动态规划
动态规划Dynamic Programming是一种重要的算法范式,它将一个问题分解为一系列更小的子问题,并通过存储子问题的解来避免重复计算,从而大幅提升时间效率。
初探动态规划
假设给定n个楼梯,每步只能1阶或者2阶,请问有多少种方案可以爬到楼顶?我们以n为3具体,具体爬楼梯过程如下图: 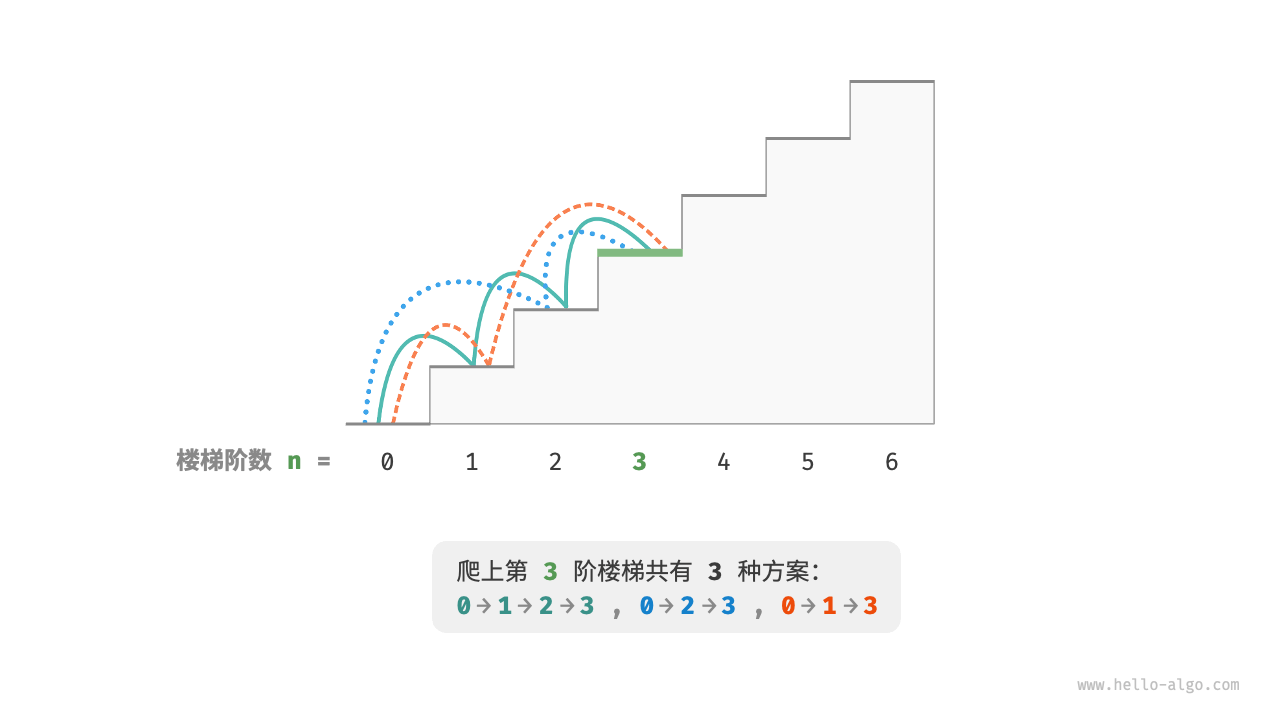
方法一:回溯
对于这一个问题,可以用上一节回溯算法来实现,其代码如下:
const backTracking = (state, n, choices, res) => {
// 爬到第n个台阶,数量加1
if (state === n) {
res.set(0, res.get(0) + 1);
return;
}
// 遍历所有选择
for (const choice of choices) {
// 剪枝:不允许超过n
if(state + choice > n) {
continue;
}
// 尝试:做出选择,更新状态
backTracking(state + choice, n, choices, res);
// 回退:无
}
};
export default function climbingStairsBacktrack(n) {
// 步骤选择
const choices = [1, 2];
// 从0阶开始爬
const state = 0;
// 存储最终结果
const res = new Map();
res.set(0, 0);
backTracking(state, n, choices, res);
return res.get(0);
}
方法二:暴力搜索
回溯算法通常并不显示的对问题进行拆解,而是将求解问题看做一系列决策步骤,通过试探和剪枝,搜索所有可能得解。
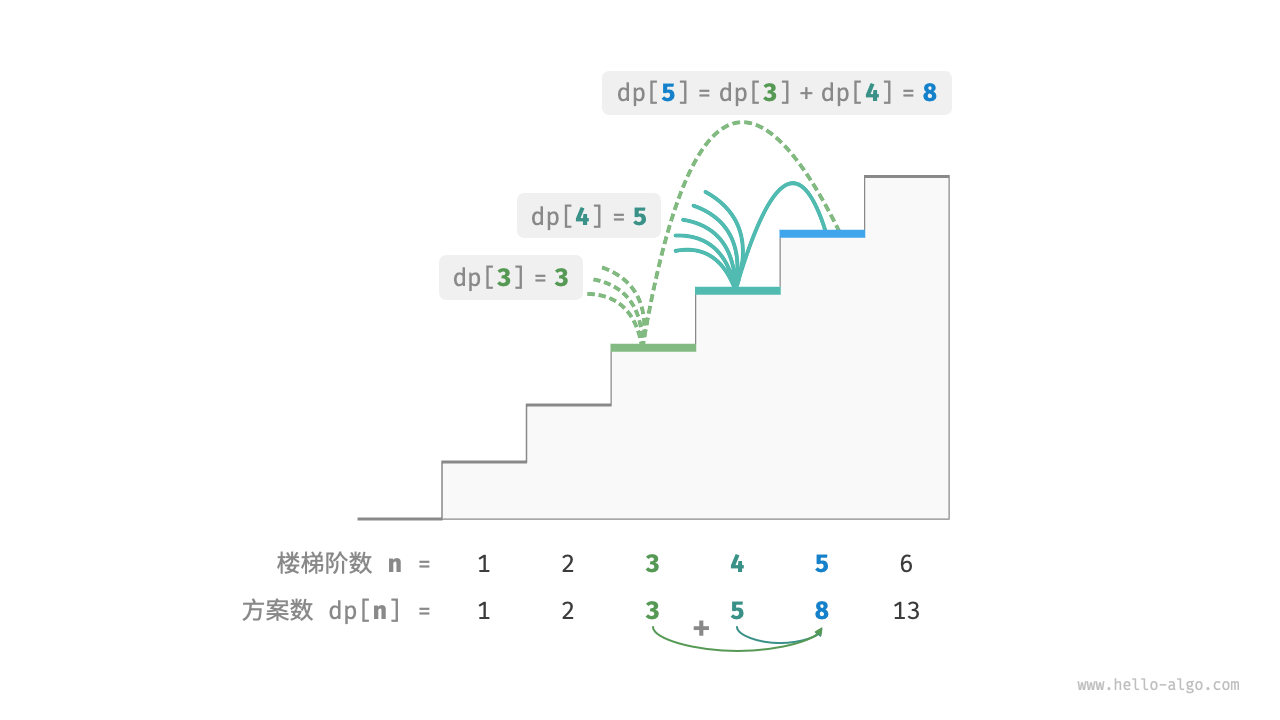
如果通过问题分解的角度来分析问题,可得到这样一个规律:爬到第i - 1阶的方案加上爬到第i - 2阶的方案就等于爬到第i阶的方案数,其公式为:dp[i] = dp[i - 1] + dp[i - 2]。
其实现代码如下:
const dfs = (n) => {
if (n === 1 || n === 2) {
return n;
}
const count = dfs(n - 1) + dfs(n - 2);
return count;
};
export default function climbingStairsDFS(n) {
return dfs(n);
}
方法三:记忆化搜索
对于暴力搜索解法,以n = 9为例,其分解图如下: 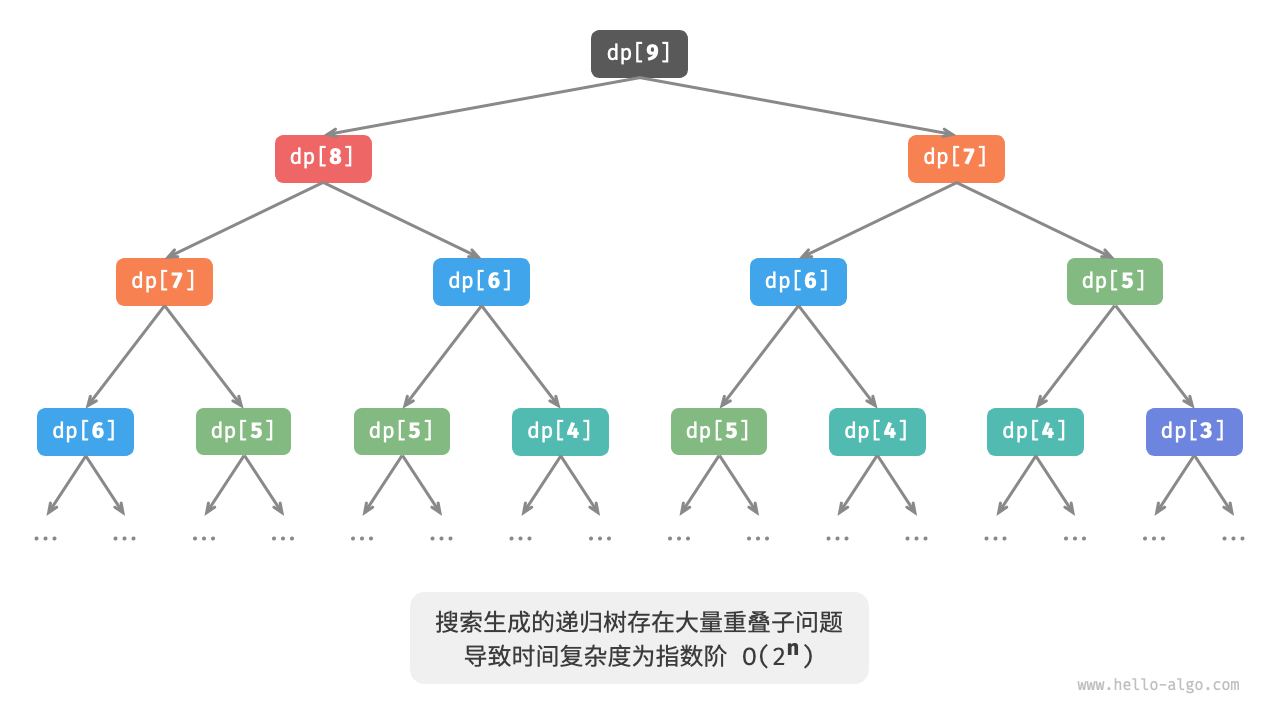
可以看到,暴力搜索形成的递归树,其递归深度为n,时间复杂度为O(2ⁿ)。指数阶属于爆炸式增长,如果我们输入一个比较大的数,则会陷入漫长的等待中。
通过观察,指数阶的时间复杂度是重叠子问题导致的,例如dp[9]被分解为dp[8]和dp[7],而dp[8]又被分解为dp[7]和dp[6],它们都包含子问题dp[7]。
为了解决以上问题,可通过引入记忆数组的方式来解决,其实现代码如下:
const dfsMember = (n, member) => {
if (n === 1 || n === 2) {
return n
}
if (member[n] !== -1) {
return member[n]
}
const count = dfsMember(n - 1, member) + dfsMember(n - 2, member)
member[n] = count
return count
}
export default function climbingStairsDfsMember (n) {
const member = new Array(n + 1).fill(-1)
return dfsMember(n, member)
}
经过以上处理,实际分解子问题如下图所示: 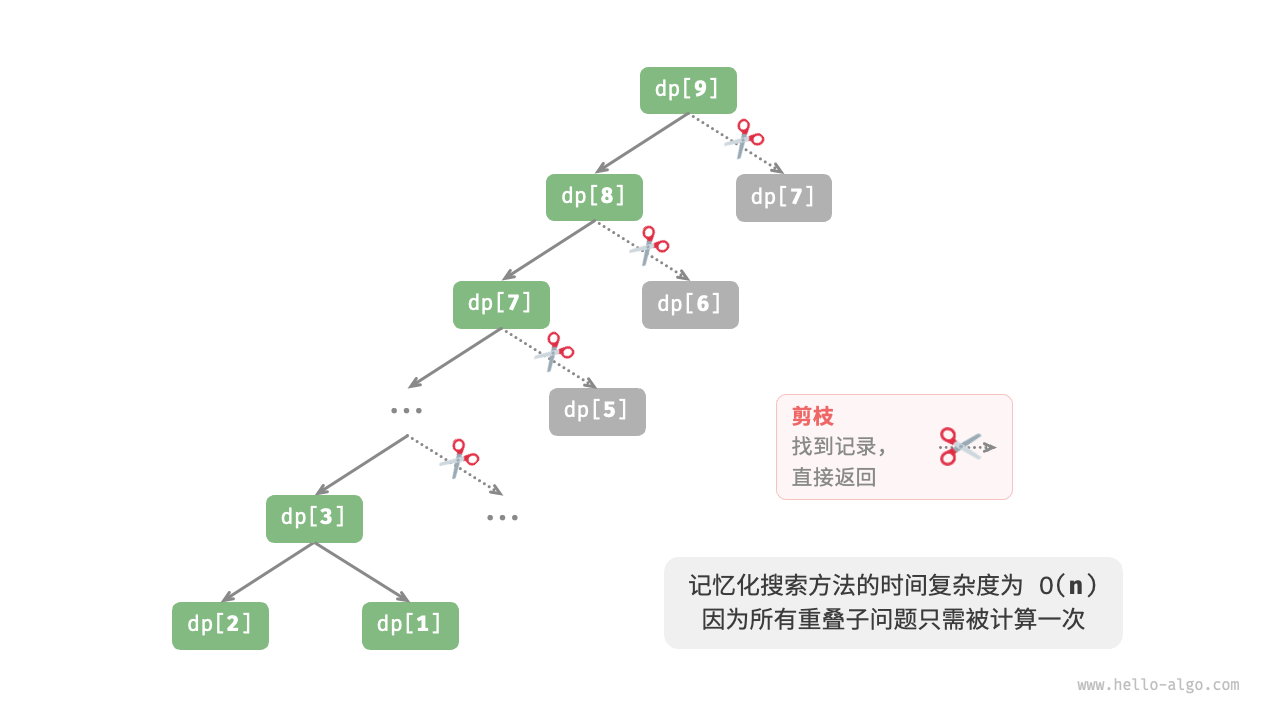
方法四:动态规划
记忆化搜索是一种从顶至底的方法:我们从原问题开始出发,递归的将较大的问题分解为较小的问题,直至解已知的最小子问题。之后,通过回溯层层收集问题的解,构建出原问题的解。
与之相反,动态规划是一种从底到顶的方法:从最小子问题的解开始,迭代地构建更大的子问题的解,直至得到原问题的解。
其实现代码如下:
export default function climbingStairsDP (n) {
if (n === 1 || n === 2) {
return n
}
// 初始化dp表
const dp = new Array(n + 1).fill(-1)
// 初始状态:预设最小问题的解
dp[1] = 1
dp[2] = 2
// 状态转移:从较小子问题逐步求解较大子问题
for(let i = 3; i <= n; i++) {
dp[i] = dp[i - 1] + dp[i - 2]
}
return dp[n]
}
根据以上代码可以发现:dp[i]至于dp[i - 1] + dp[i - 2]有关,因此无须定义dp数组,其空间优化代码如下:
export default function climbingStairsDP (n) {
if (n === 1 || n === 2) {
return n
}
// 初始状态:预设最小问题的解
let a = 1
let b = 2
// 状态转移:从较小子问题逐步求解较大子问题
for(let i = 3; i <= n; i++) {
let temp = b
b = a + b
a = temp
}
return b
}
以上代码,使用图例表示如下: 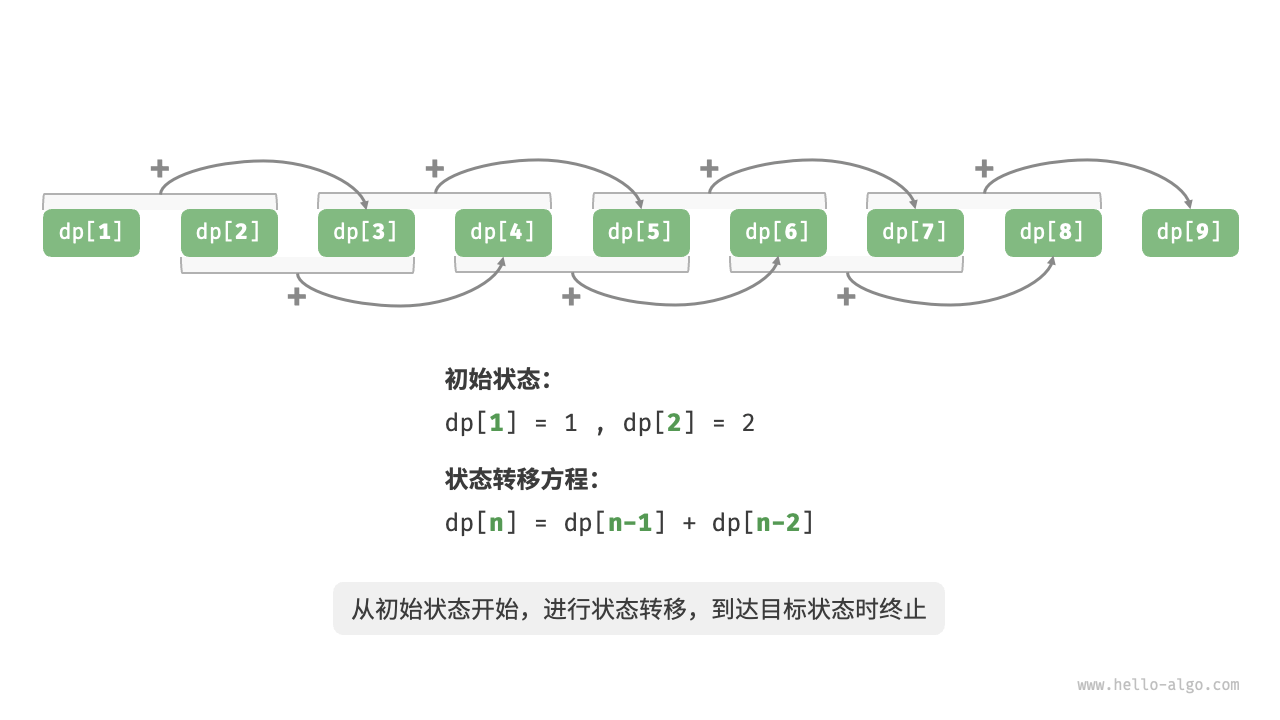
在动态规划中,有一些术语:
- dp表:例如以上代码中的
dp数组。其中dp[i]被称为对应子问题的解。 - 初始状态:最小子问题对应的状态,例如以上代码中的
1和2。 - 状态转移方程:以上代码中的递推公式:
dp[i] = dp[i - 1] + dp[i - 2]。
DP问题特性
子问题分解是一种通用的算法思路,在分治,动态规划和回溯中的侧重点不同,如下:
- 分治算法:分治算法递归的将原问题划分为多个相互独立的子问题,直至最小子问题,并在回溯中合并子问题的解,最终得到原问题的解。
- 动态规划:动态规划也对问题进行分解,但与分治算法的主要区别是,动态规划中的子问题是相互依赖的,在分解过程中会出现许多重叠的子问题。
- 回溯算法:回溯算法在尝试和回退中穷举所有可能的解,并通过剪枝避免不必要的搜索分支。原问题的解由一系列决策步骤构成,可以将每个决策步骤之前的子序列看出一个子问题。
实际上,动态规划常用来求解最优化问题,它们不仅包含重叠子问题,还具有另外两大特性:最优子结构、无后效性。
最优子结构
最优子结构的含义:原问题的最优解是从子问题的最优解构建得来的。
假设有这样一个问题:给定一个楼梯,每步可以上1阶或者2阶,每一阶楼梯上都贴有一个非负整数,表示在该台阶所需要付出的代价。给定一个非负整数数组cost,其中cost[i]表示在第i个台阶需要付出的代价,cost[0]为地面(起始点),请问最小需要付出多少代价才能到达顶部?
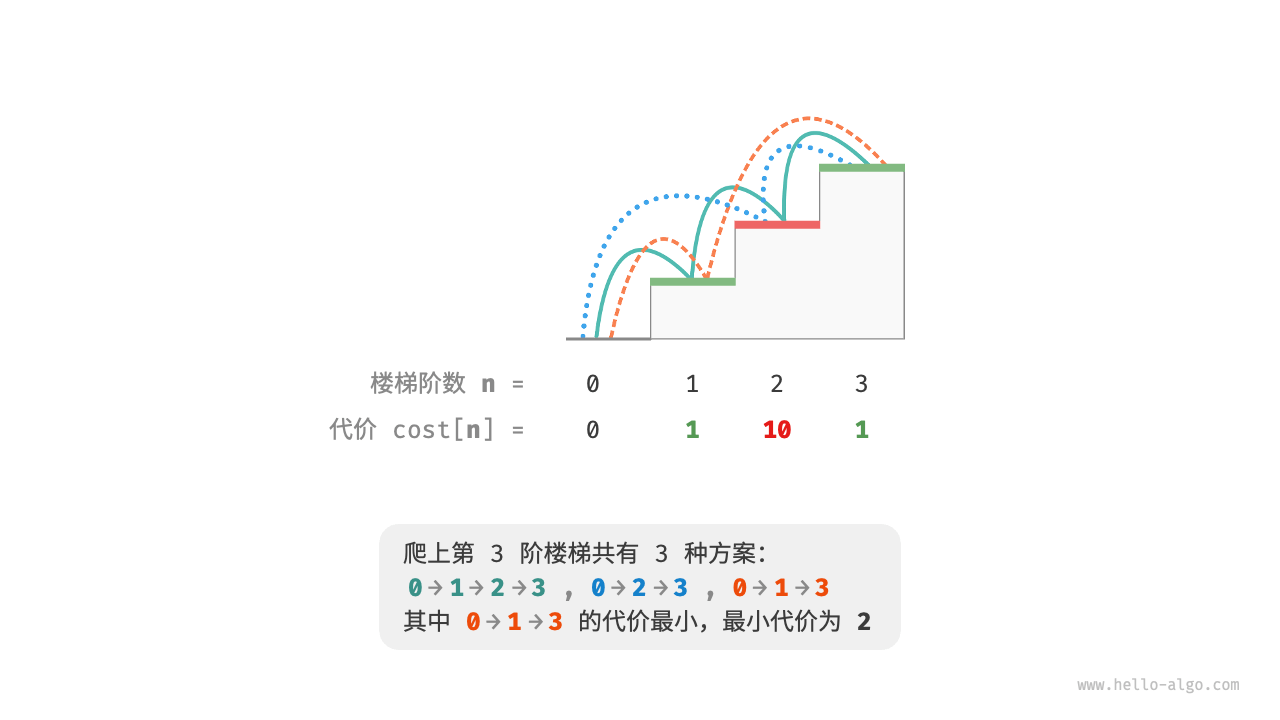
设dp[i]为爬到第i阶累计付出的代价,由于第i阶只能从i - 1或者i - 2阶走来,因此d[i]只可能等于dp[i - 1] + cost[i]或者dp[i - 2] + cost[i]。为了尽可能减少代价,应该选择两者中较小的那一个,其公式为:dp[i] = min(dp[i - 1], dp[i - 2]) + cost[i]。
其实现代码如下:
export default function minCostClimbingStairsDP(cost) {
const n = cost.length - 1;
if (n === 1 || n === 2) {
return cost[n];
}
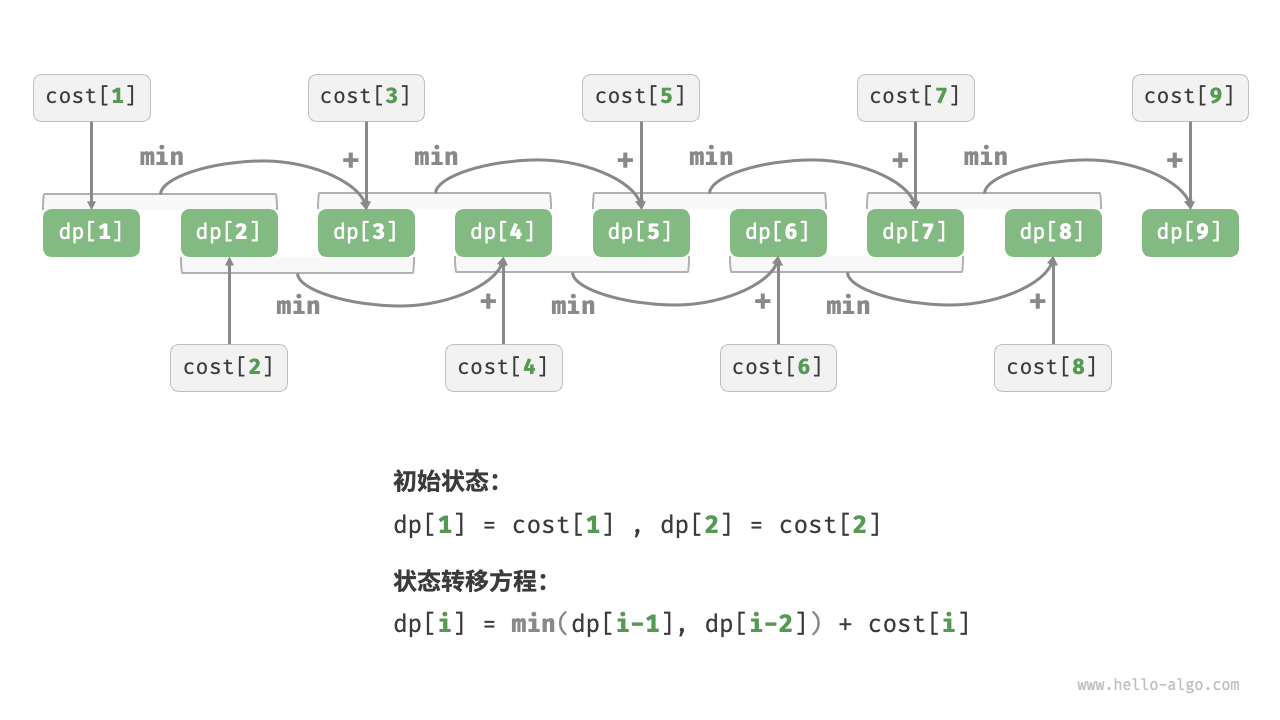
// 初始状态:预设最小问题的解
let a = cost[1];
let b = cost[2];
// 状态转移:从较小的子问题逐步求解较大子问题
for(let i = 3; i <= n; i++) {
let temp = b;
b = Math.min(a, b) + cost[i];
a = temp;
}
return b;
}
无后效性
无后效性:无后效性是动态规划能够有效解决问题的重要特性之一,其定义为:给定一个确定的状态,它的未来发展只与当前状态有关,而与过去的经历的所有状态无关。
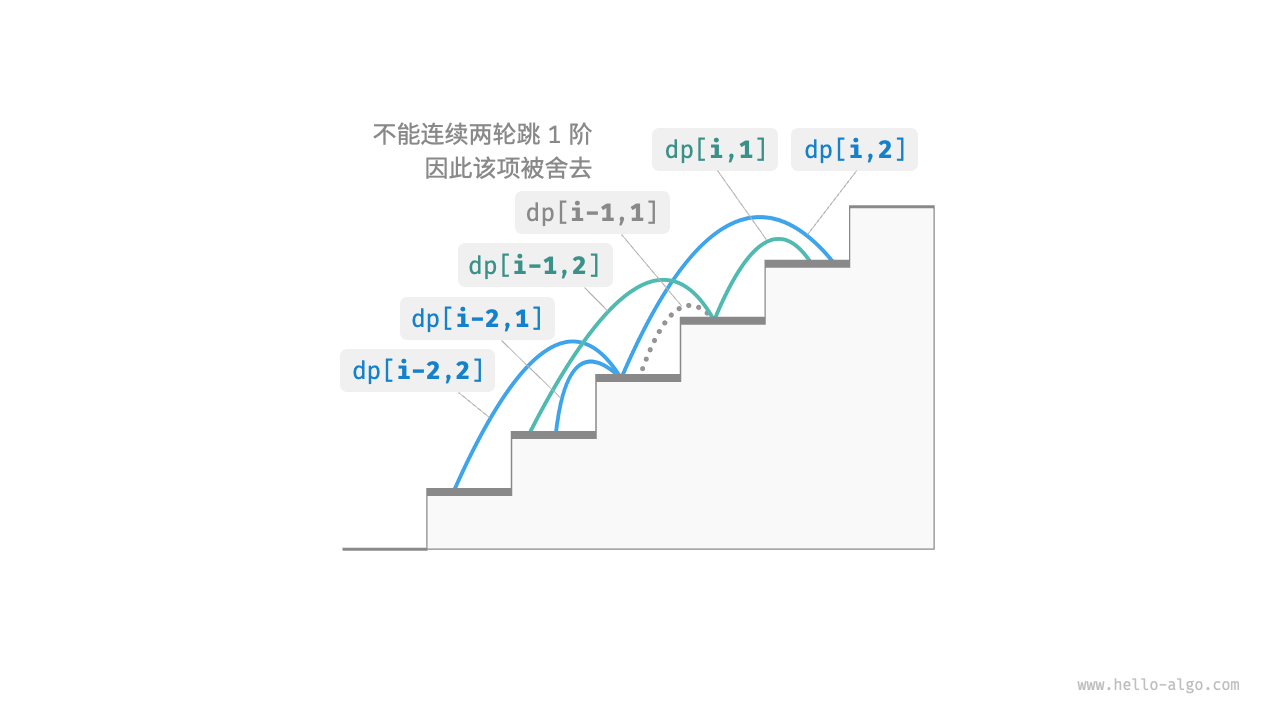
假设有这样一个问题:给定一个n阶的楼梯,每步可以上1阶或者2阶,但不能连续两轮跳1阶,请问有多少种方案可以爬到楼顶?
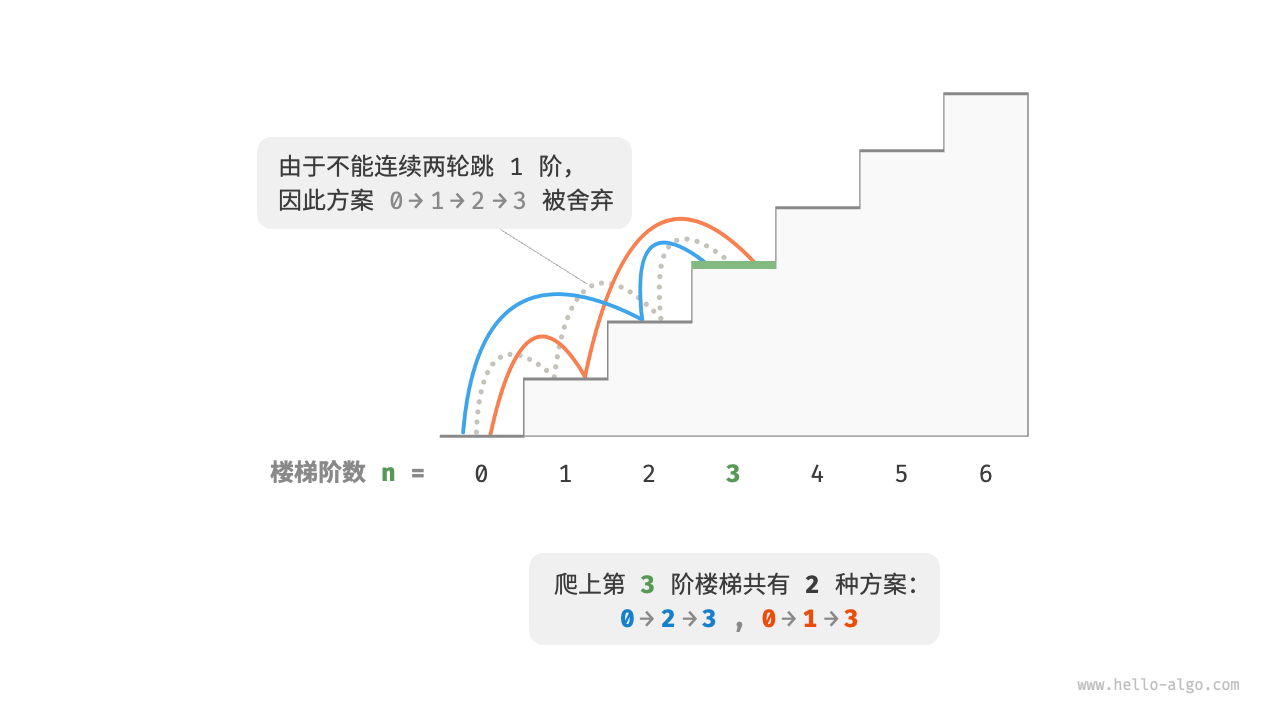
在以上问题中,如果上一轮是跳1阶而来,那么下一轮就必须是2阶。这意味着:下一步选择不能由当前状态独立决定,还和前一个状态有关。
为此,我们需要扩展状态的定义:状态[i, j]表示处在第i阶并且上一轮跳了j阶,其中j∈{1,2}。
- dp[i,1] = dp[i-1,2]:上一轮跳了1阶时,上上一轮只能选择跳2阶。
- dp[i,2] = dp[i-2,1] + dp[i-2,2]:上一轮跳2阶时,上上一轮可选择跳1阶或者2阶。
- dp[n] = dp[n,1] + dp[n,2]:两者之和代表爬到
n阶的方案总数。
实现代码如下:
export default function climbingStairsConstraintDP (n) {
if (n === 1 || n === 2) {
return 1
}
// 初始化dp表,用于存储子问题的解
const dp = Array.from(new Array(n + 1), () => new Array(3))
// 初始状态:预设最小子问题的解
dp[1][1] = 1
dp[1][2] = 0
dp[2][1] = 0
dp[2][2] = 1
// 状态转移:从较小子问题逐步求解较大子问题
for(let i = 3; i <= n; i++) {
dp[i][1] = dp[i - 1][2]
dp[i][2] = dp[i - 2][1] + dp[i - 2][2]
}
return dp[n][1] + dp[n][2]
}
DP解题思路
问题判断
如果一个问题包含重叠子问题、最优子结构,并满足无后效性,那么它通常适合使用动态规划求解。然而,我们很难从问题描述中直接提取出这些特性。因此,我们通常会放宽条件,先观察问题是否适合使用回溯解决。
适合用回溯解决的问题通常满足“决策树模型”,这种问题可以使用树形结构来描述,其中每个节点代表一个决策,每条路径代表一个决策序列。
换句话说,如果问题包含明确的决策概念,并且解是通过一系列决策产生的,那么它就满足决策树模型,通常可以使用回溯来解决。
在此基础上,动态规划问题还有一些判断的加分项:
- 问题包含最大、最小、最多、最少等最优化描述。
- 问题的状态能够使用一个列表,多维矩阵或者树来表示,并且一个状态与其周围的状态存在递推关系。
相应的,也存在一些减分项:
- 问题的目标是找出所有可能得解决方案,而不是找出最优解。
- 问题描述中右明显的排列组合的特征,需要返回具体的多个方案。
问题求解步骤
动态规划的解题流程会因问题的性质和难度有所不同,但通常遵循以下步骤:描述决策、定义状态、建立dp表、推到状态转移方程、确定边界条件等。
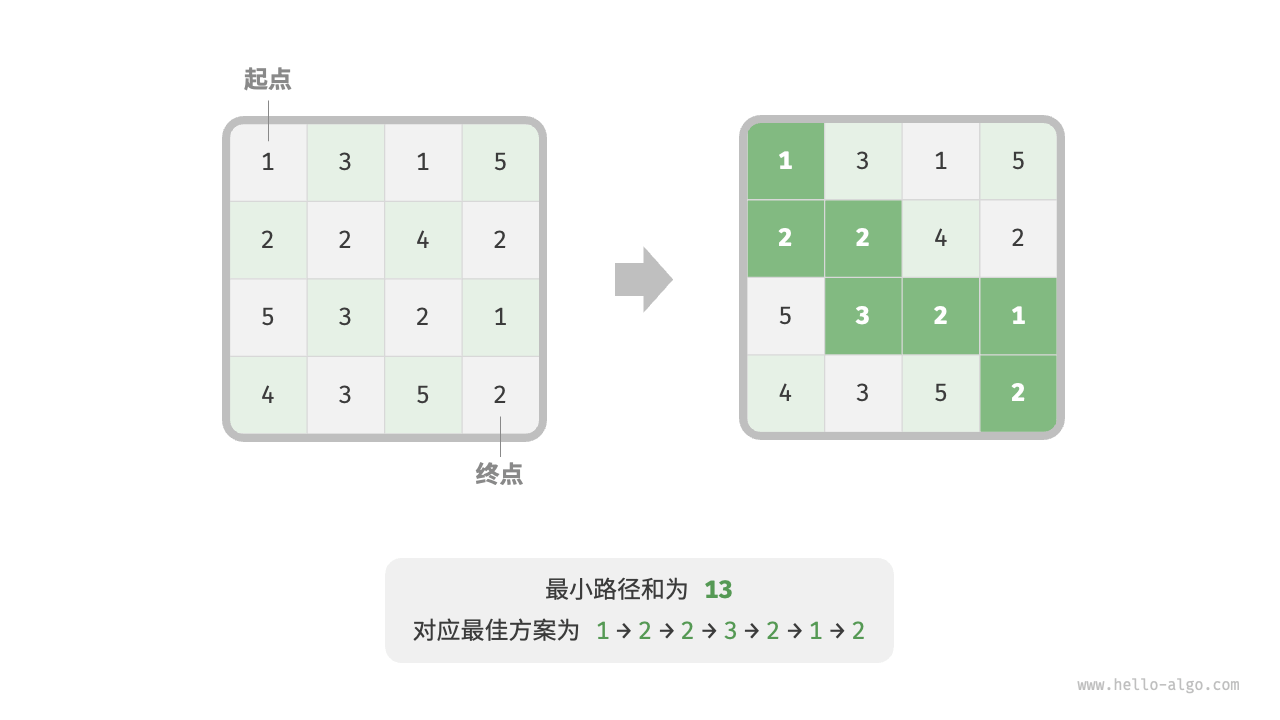
假设有这样一个问题:给定n * m的二维网格,网格中每个单元格包含一个非负整数,表示该单元格的代价。机器人从以左上角单元格为起点,每次只能向下或者向右移动一步,直至到达右下角单元格。请返回,从左上角到右下角的最小路径和。
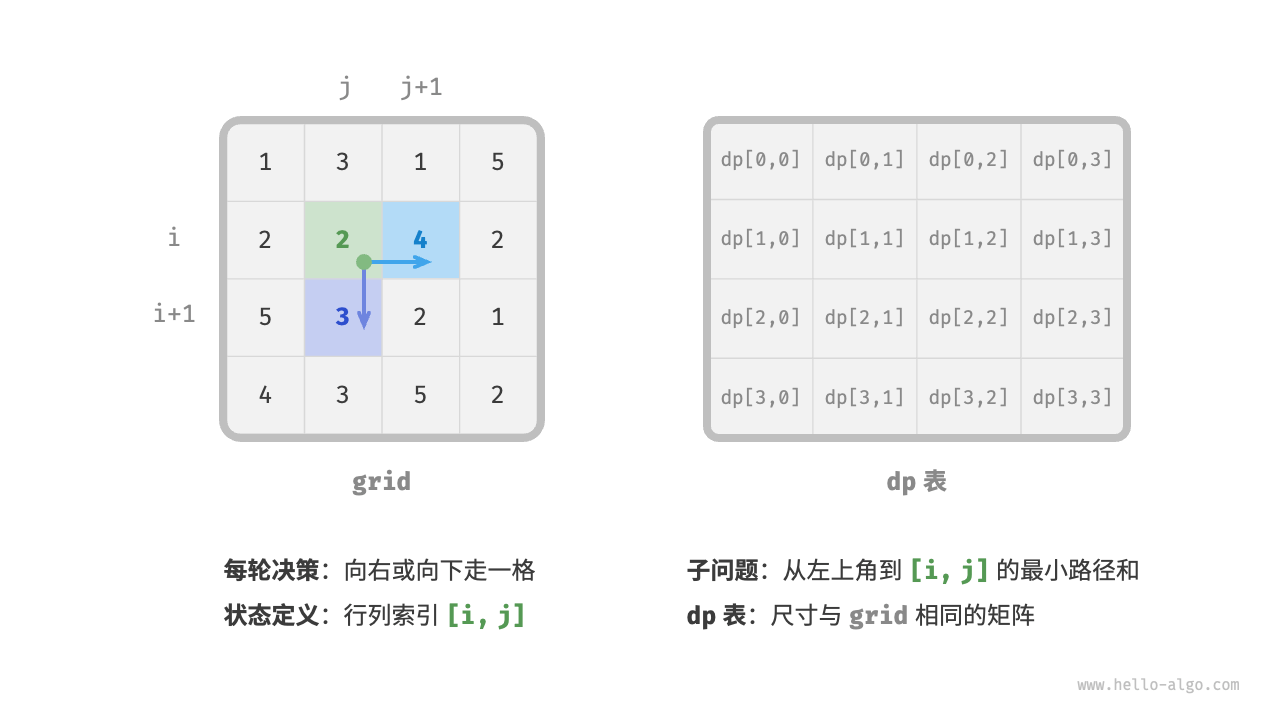
第一步:思考每轮的决策,定义状态,从而得到dp表。
- 每轮决策:从当前格子向下或者向右走一步。
- 定义状态:当前格子的行列索引为
[i,j],向下或者向右后,其对应状态分别为:[i+1,j]和[i,j+1]。 - dp表:尺寸与网格
grid相同的矩阵。
第二步:找出最优子结构,进而推导出状态转移方程。
- 最优子结构:对于状态
[i,j],它只能从上边格子[i-1,j]和左边格子[i,j-1]转移而来,因此最优子结构为:到达[i,j]的最小路径和由[i-1,j]和[i,j-1]的最小路径和中较小的那一个决定。 - 状态转移方程:根据最优子结构,可以推导出其状态转移方程为:
dp[i,j] = min(dp[i-1,j], dp[i,j-1]) + grid[i,j]。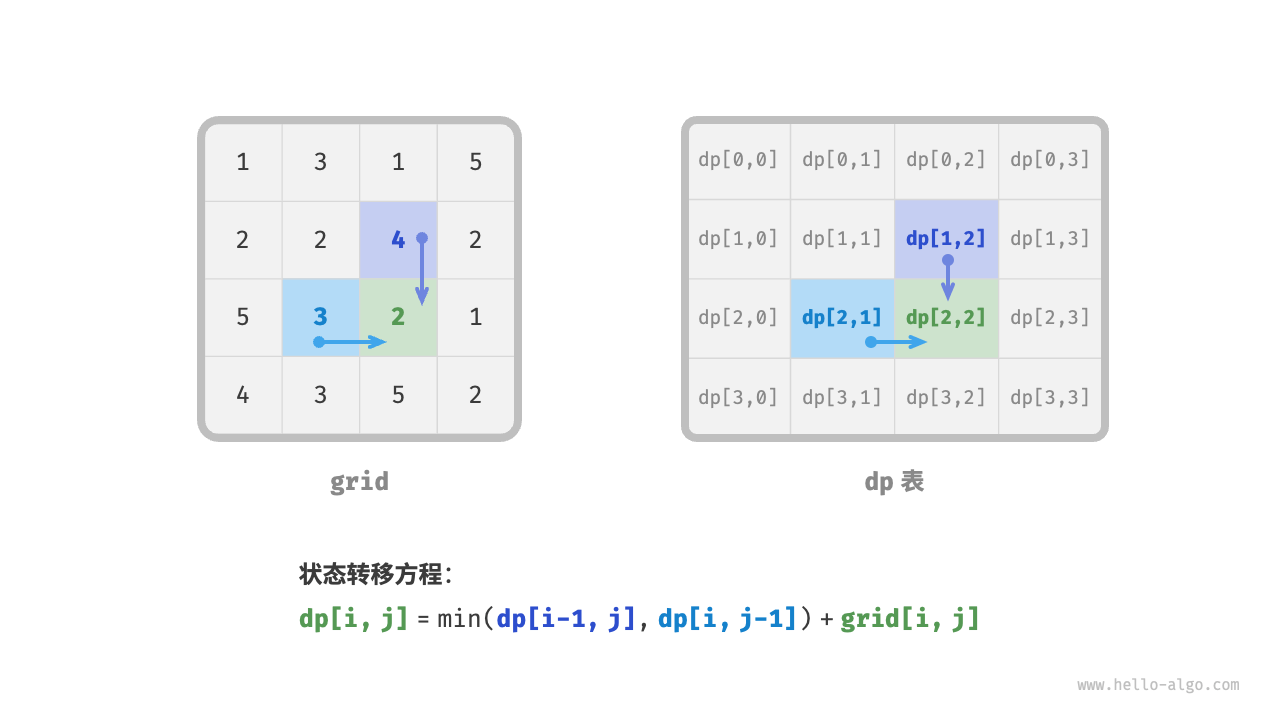
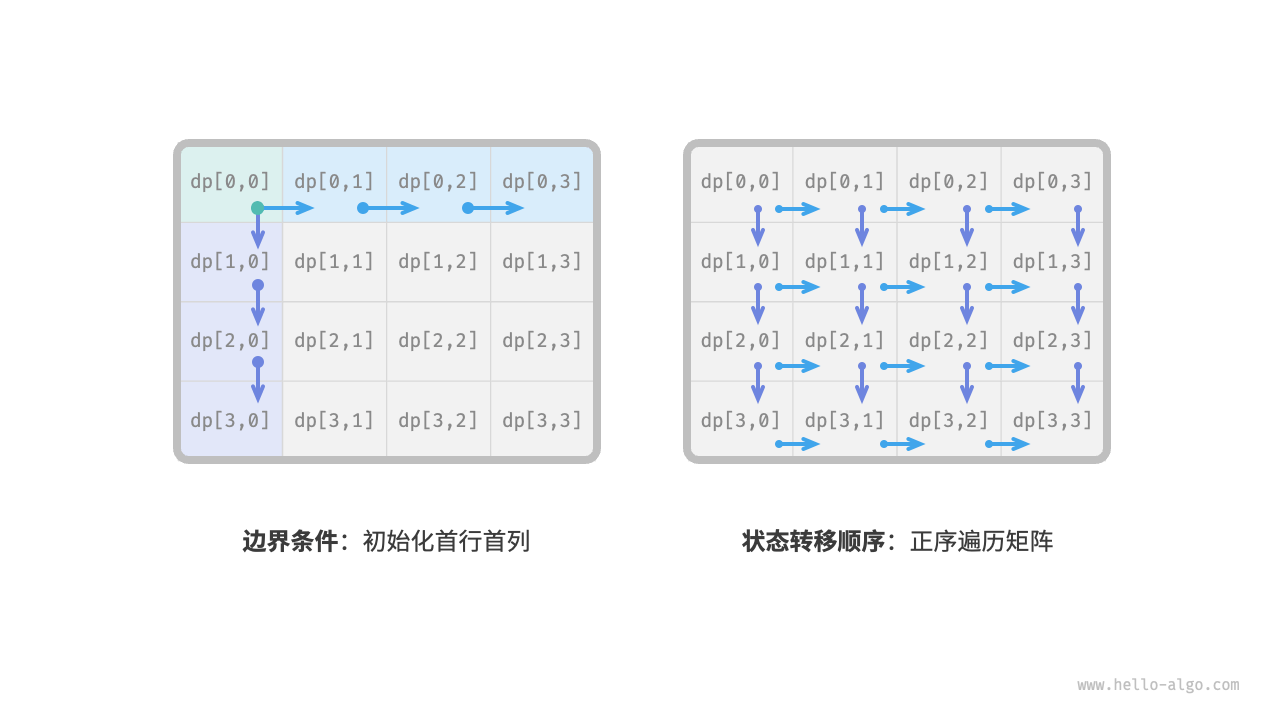
第三步:确定边界问题和状态转移顺序
- 边界问题:处在首行的状态,其只能从其左边的状态得来;处在首列的状态,其只能从其上边的状态得来。因此,首行
i = 0,首列j = 0就是边界条件。 - 状态转移顺序:由于每个格子只能由其左方格子和上方格子转移而来,因此我们使用循环来遍历矩阵,外层循环遍历各行,内层循环遍历各列。
方法一:暴力搜索:
从状态[i,j]开始搜索,不断的分解为更小的状态[i-1,j]和[i,j-1],递归函数包括以下要素:
- 递归参数:状态
[i,j] - 返回值:从
[0,0]到[i,j]的最小路径和dp[i,j] - 终止条件:当
i=0且j=0时,返回代价grid[0,0] - 剪枝:当
i < 0或者j < 0时,返回代价+∞,代表不可行。
其实现代码如下:
// 方法一:暴力搜索
export const minPathSumDFS = (grid, i, j) => {
// 终止条件
if(i === 0 && j === 0) {
return grid[0][0];
}
// 越界
if(i < 0 || j < 0) {
return Infinity;
}
// 计算左上角到[i-1,j]的最小路径和
const left = minPathSumDFS(grid, i - 1, j);
// 计算左上角到[i,j-1]的最小路径和
const up = minPathSumDFS(grid, i, j - 1);
// 计算左上角到[i,j]的最小路径和
return Math.min(left, up) + grid[i][j];
};
暴力搜素存在一些重叠子问题,其原因是:存在多条路径可以从左上角到达某个单元格。 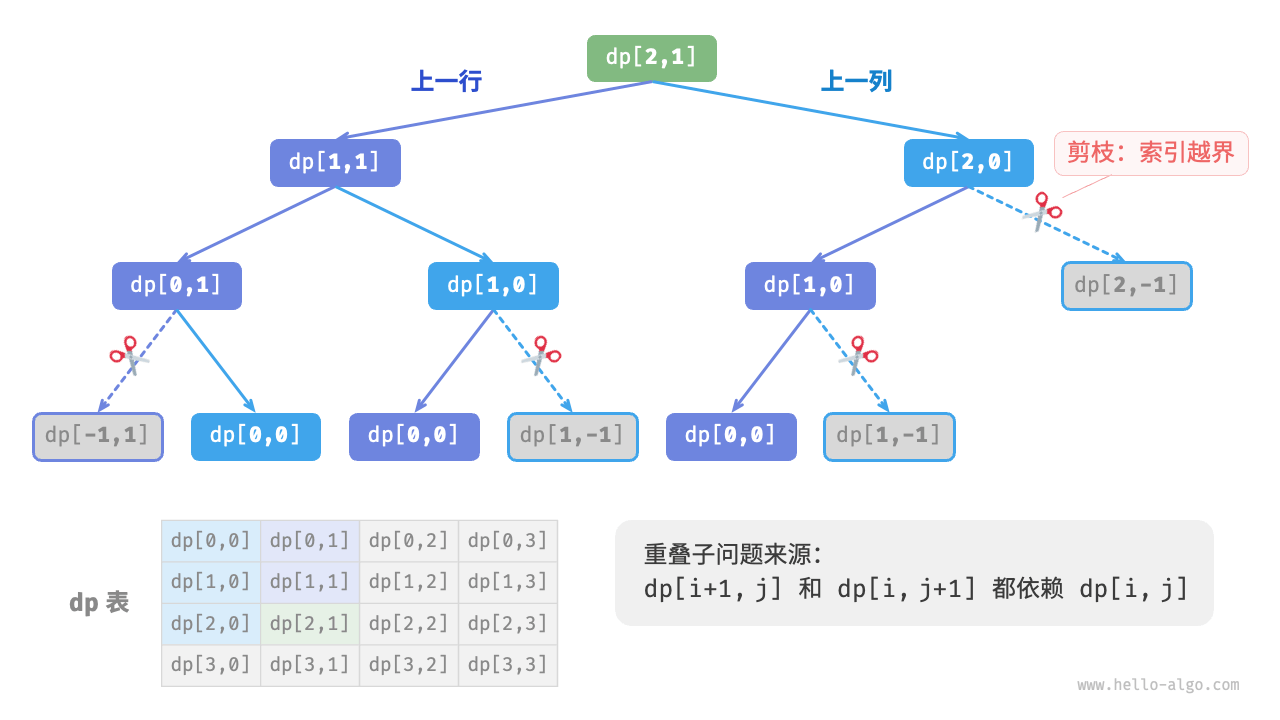
方法二:记忆化搜索:
为了解决暴力搜索中的问题,我们引入和网格grid相同大小的member记忆网格,用于记录各个问题的解,并将重叠子问题进行剪枝:
其实现代码如下:
// 方法二:记忆化搜索
export const minPathSumMemberDFS = (grid, member, i, j) => {
// 终止条件
if(i === 0 && j === 0) {
return grid[0][0];
}
// 越界
if(i < 0 || j < 0) {
return Infinity;
}
// 剪枝:如果有记录,则直接返回
if(member[i][j] !== -1) {
return member[i][j];
}
// 计算左上角到[i-1,j]的最小路径和
const left = minPathSumDFS(grid, i - 1, j);
// 计算左上角到[i,j-1]的最小路径和
const up = minPathSumDFS(grid, i, j - 1);
// 记忆化
member[i][j] = Math.min(left, up) + grid[i][j];
return member[i][j];
};
在引入记忆化后,所有子问题的解只需计算一次。 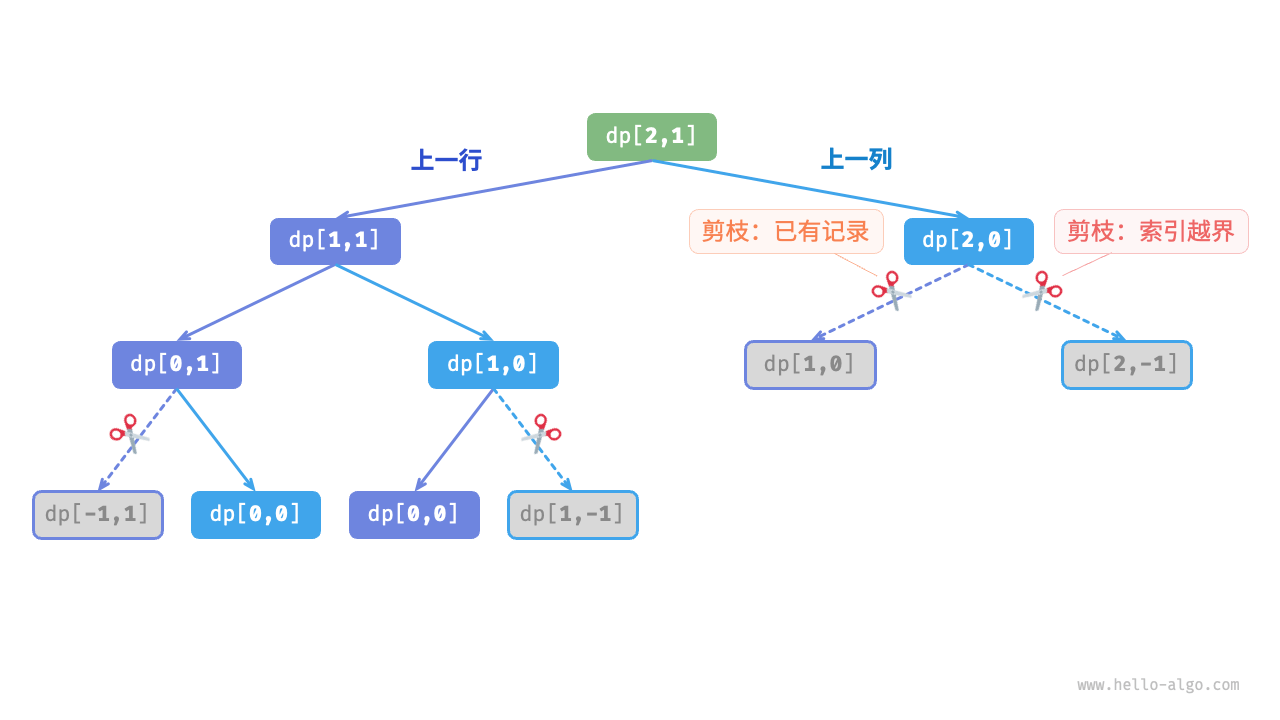
方法三:动态规划:
基于迭代实现动态规划,其代码如下:
// 方法三:动态规划
export const minPathSumDP = (grid) => {
const n = grid.length;
const m = grid[0].length;
// 初始化dp表
const dp = Array.from({ length: n }, () => Array.from({ length: m }, () => 0));
dp[0][0] = grid[0][0];
// 状态转移:首行
for (let j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 状态转移:首列
for (let i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 状态转移:其余行和列
for (let i = 1; i < n; i++) {
for (let j = 1; j < m; j++) {
dp[i][j] = Math.min(dp[i - 1][j], dp[i][j - 1]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
};
空间优化:由于每个格子只与其左边和上边的格子有关,因此我们可以只用一个单行数组来实现dp表。
// 方法三:动态规划(空间优化版)
export const minPathSumDPComp = (grid) => {
const n = grid.length;
const m = grid[0].length;
// 初始化dp表
const dp = new Array(m);
dp[0] = grid[0][0];
// 状态转移:首行
for (let j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 状态转移:其余行和列
for (let i = 1; i < n; i++){
// 状态转移:首列
dp[0] = dp[0] + grid[i][0];
// 状态转移:其余列
for (let j = 1; j < m; j++) {
dp[j] = Math.min(dp[j], dp[j - 1]) + grid[i][j];
}
}
return dp[m - 1];
};
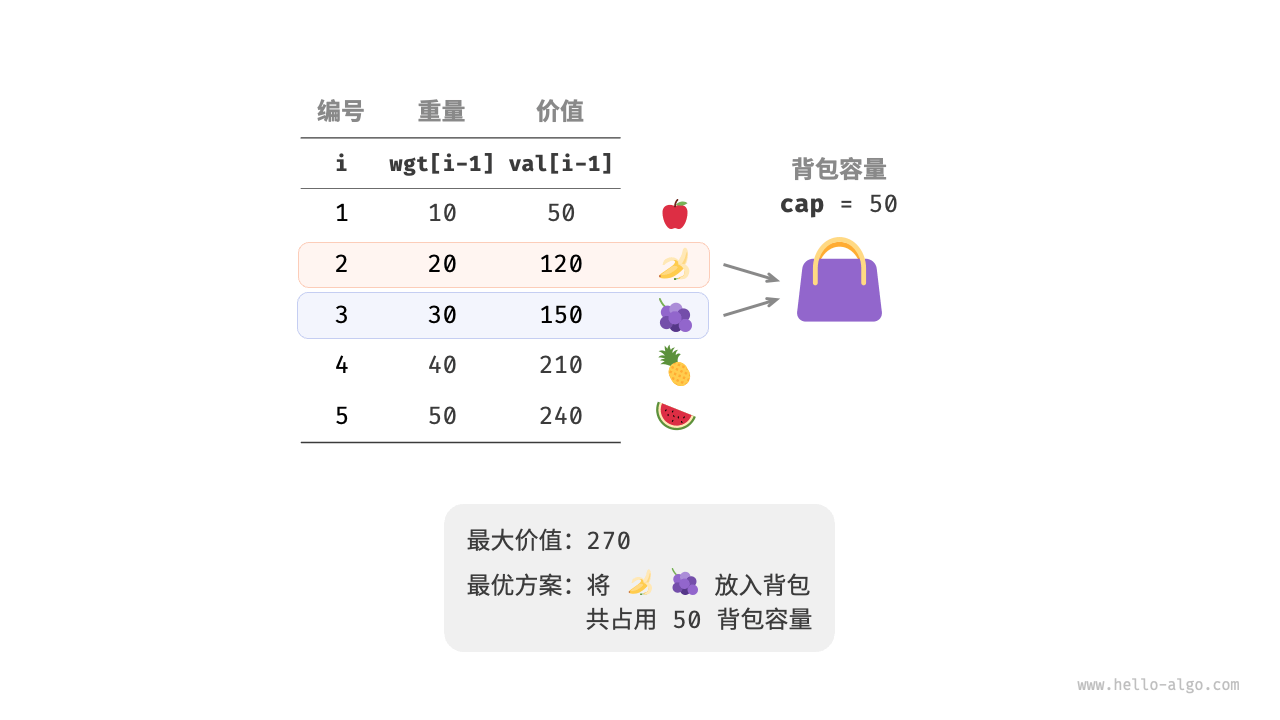
0-1背包问题
假设有这样一个问题:给定n个物品,第i个物品的重量为wgt[i - 1]、价值为val[i - 1],和一个容量为cap的背包。每个物品只能选择一次,问在限定背包容量下能放入物品的最大价值。
第一步:思考每轮的决策、定义状态、从而得到dp表。
- 每轮决策:对于每个物品来说,可选择放入和不放入。放入时,背包容量减少,价值增加;不放入时,背包容量不变,价值不变。
- 定义状态:
[i, c],其中i表示物品编号,c表示剩余背包容量。即dp[i, c]表示第i个物品在剩余容量为c的背包中的最大价值。 - dp表:
(n + 1) * (c + 1)的二维表。
第二步:找出最优子结构,进而推导出状态转移方程。 当我们做出物品i的决策后,剩余的是前i - 1个物品的决策,可分为两种情况:
- 不放入物品
i:背包容量不变,状态变化为[i - 1, c]。 - 放入物品
i:背包容量减少wgt[i - 1],价值增加val[i - 1],状态变化为[i - 1, c - wgt[i - 1]]。
分析完上述问题后,我们可以得出:
- 最优子结构:最大价值
dp[i, c]等于不放入物品i和放入物品i两种方案种价值更大的那一个。 - 状态转移方程:
dp[i, c] = max(dp[i - 1, c], dp[i - 1, c - wgt[i - 1]] + val[i - 1])。
第三步:确定边界条件和状态转移顺序。
- 边界条件:当无物品或无剩余背包容量时,最大价值为
0,即首行dp[0, c]和首列dp[i, 0]都等于0。 - 状态转移顺序:当前状态
[i, c]从上方状态[i - 1, c]和左上方的状态[i - 1, c - wgt[i - 1]]转移而来。
方法一:暴力搜索
暴力搜索包含以下要素:
- 递归参数:状态
[i, c]。 - 返回值:子问题的解
dp[i, c] - 终止条件:当物品编号越界
i = 0或背包容量为0时,终止递归并返回价值0。 - 剪枝:若当前物品重量超出背包剩余容量,则只能选择不放入。
// 方法一:暴力搜索
export const knapsackDFS = (wgt, val, i, c) => {
// 已选完或背包容量为0,则返回价值0
if(i === 0 || c === 0) {
return 0;
}
// 物品重量超过背包剩余容量,不放入物品
if(wgt[i - 1] > c) {
return knapsackDFS(wgt, val, i - 1, c);
}
// 计算不放入物品i的最大价值
const noVal = knapsackDFS(wgt, val, i - 1, c);
// 计算放入物品i的最大价值
const yesVal = knapsackDFS(wgt, val, i - 1, c - wgt[i - 1]) + val[i - 1];
// 返回最大价值
return Math.max(noVal, yesVal);
};
观察递归树,容易发现其中存在重复子问题,如下图: 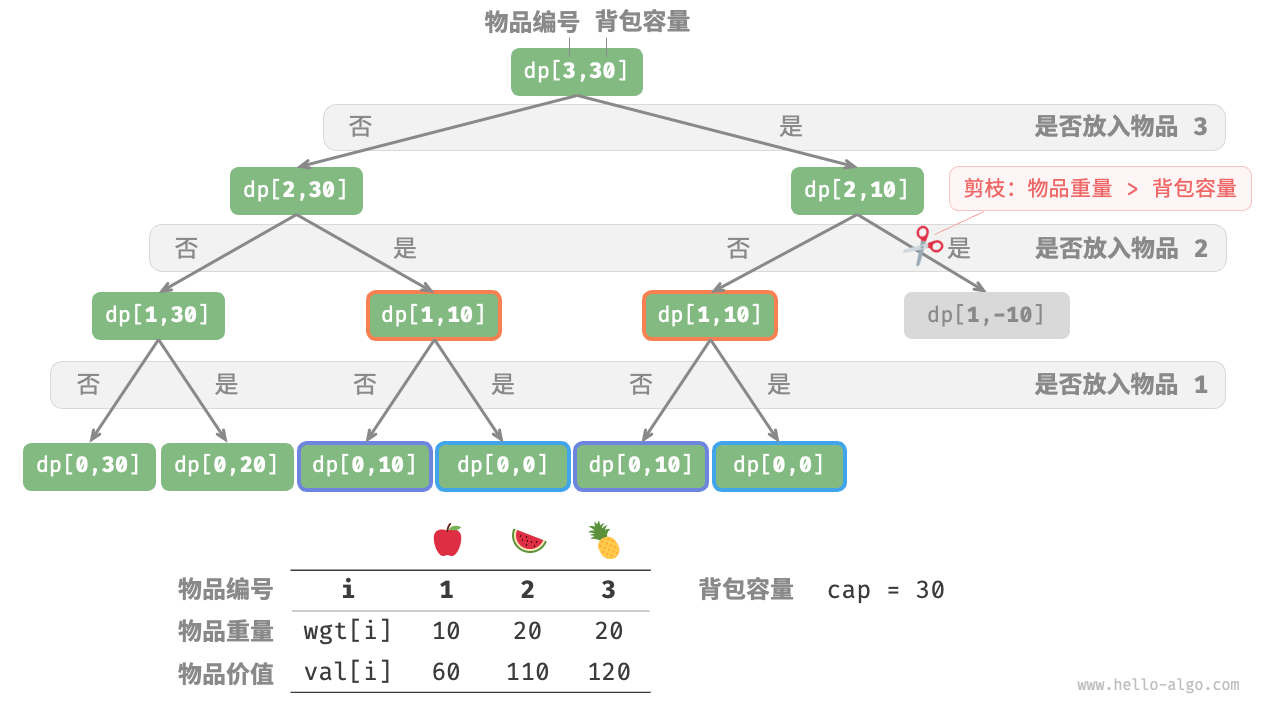
方法二:记忆化搜索
为了保证重叠子问题只被计算一次,我们可以借助记忆列表member,其中member[i][c]表示dp[i][c]。
记忆化搜索实现代码如下:
// 方法二:记忆化搜索
export const knapsackMemberDFS = (wgt, val, member, i, c) => {
// 已选完或背包容量为0,则返回价值0
if(i === 0 || c === 0) {
return 0;
}
// 如果已被计算过,则直接返回
if(member[i][c] !== -1) {
return member[i][c];
}
// 物品重量超过背包剩余容量,不放入物品
if(wgt[i - 1] > c) {
return knapsackMemberDFS(wgt, val, member, i - 1, c);
}
// 计算不放入物品i的最大价值
const noVal = knapsackMemberDFS(wgt, val, member, i - 1, c);
// 计算放入物品i的最大价值
const yesVal = knapsackMemberDFS(wgt, val, member, i - 1, c - wgt[i - 1]) + val[i - 1];
// 存储当前计算结果
member[i][c] = Math.max(noVal, yesVal);
// 返回最大价值
return member[i][c];
};
方法三:动态规划
动态规划实质上就是在状态转移的过程中填充dp表的过程,其实现代码如下:
export const knapsackDP = (wgt, val, cap) => {
const n = wgt.length;
// 初始dp表
const dp = Array.from({ length: n + 1 }, () => new Array(cap + 1).fill(0));
// 状态转移
for (let i = 1; i <= n; i++) {
for (let c = 1; c <= cap; c++) {
// 物品重量超过背包剩余容量,不放入物品
if(wgt[i - 1] > c) {
dp[i][c] = dp[i - 1][c];
} else {
dp[i][c] = Math.max(
dp[i - 1][c],
dp[i - 1][c - wgt[i - 1]] + val[i - 1]
);
}
}
}
return dp[n][cap];
};
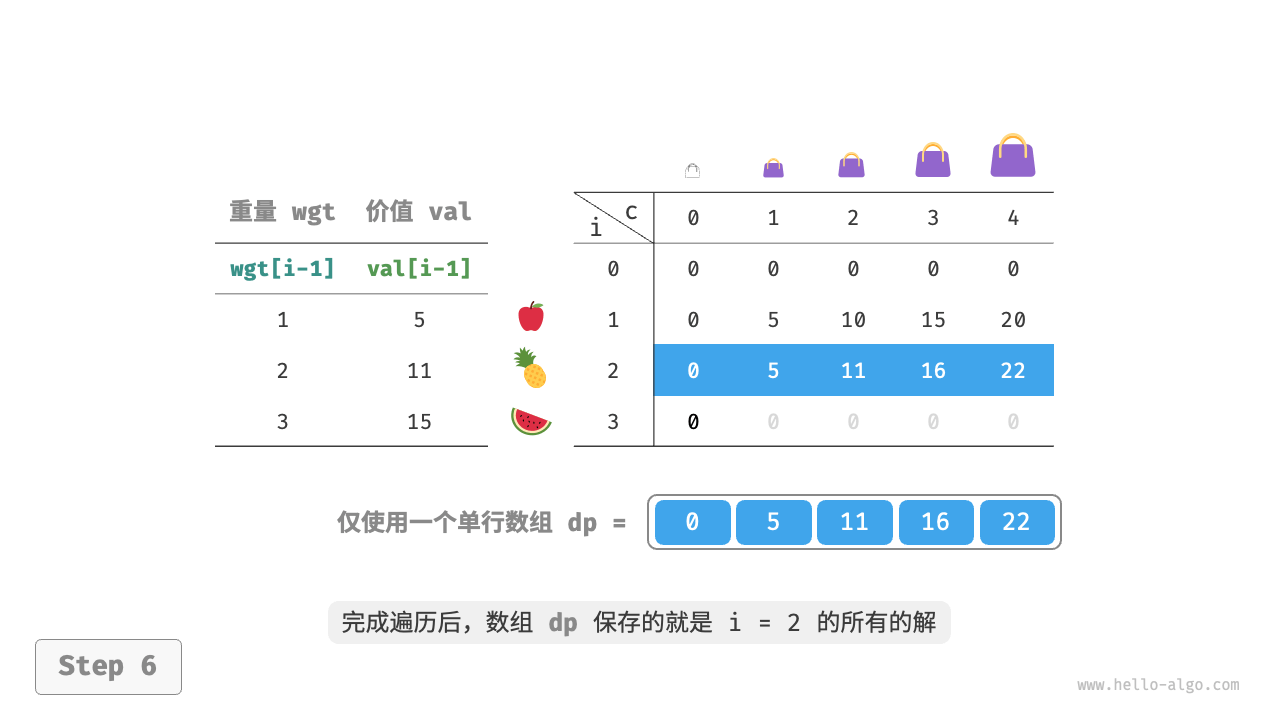
空间优化
可使用一个一维数组,其中内层循环倒序遍历,如下: 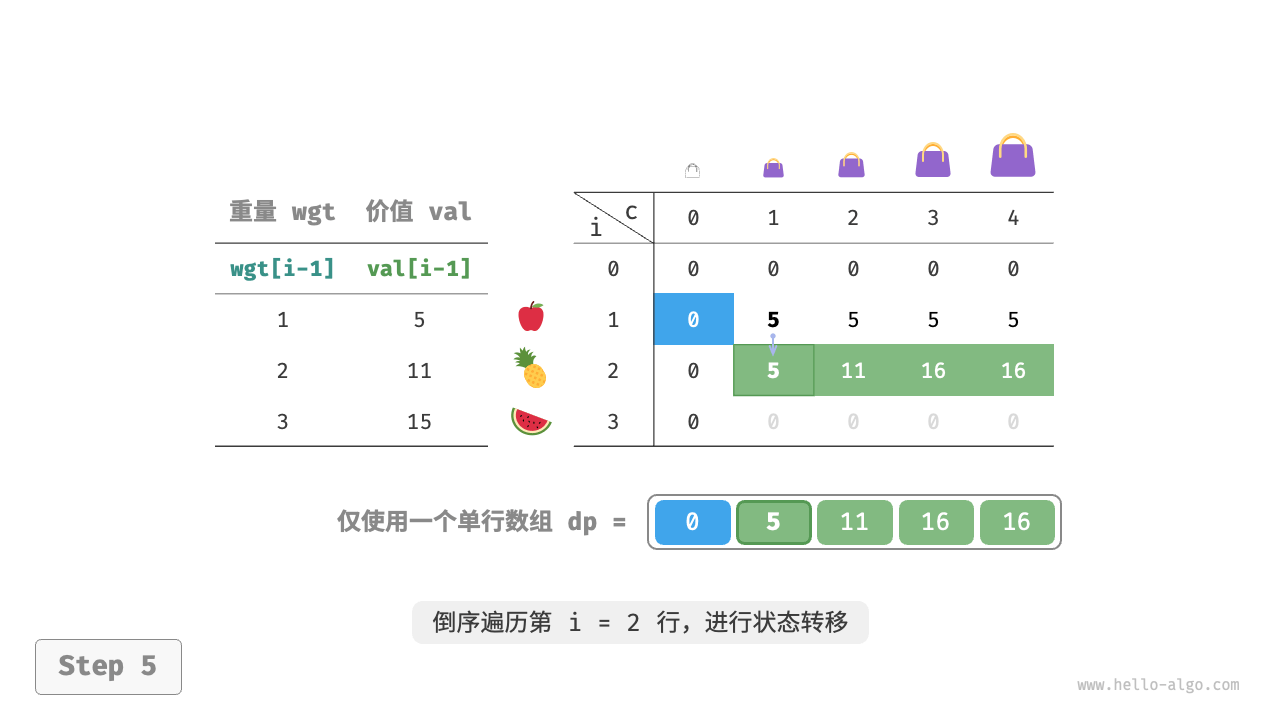
其空间优化代码如下:
export const knapsackDPComp = (wgt, val, cap) => {
const n = wgt.length;
// 初始dp表
const dp = new Array(cap + 1).fill(0);
// 状态转移
for (let i = 1; i <= n; i++) {
for(let c = cap; c >= 1; c--) {
if(wgt[i - 1] <= c) {
dp[c] = Math.max(
dp[c],
dp[c - wgt[i - 1]] + val[i - 1]
);
}
}
}
return dp[cap];
};
完全背包问题
完全背包问题和0-1背包问题非常相似,它们的区别仅在于不限制物品的选择次数。
完全背包问题
假设给定n个物品,第i个物品的重量为wgt[i-1]、价值为val[i-1]和一个容量为cap的背包。每个物品可以重复选取,问在限定背包容量下能放下物品的最大价值。 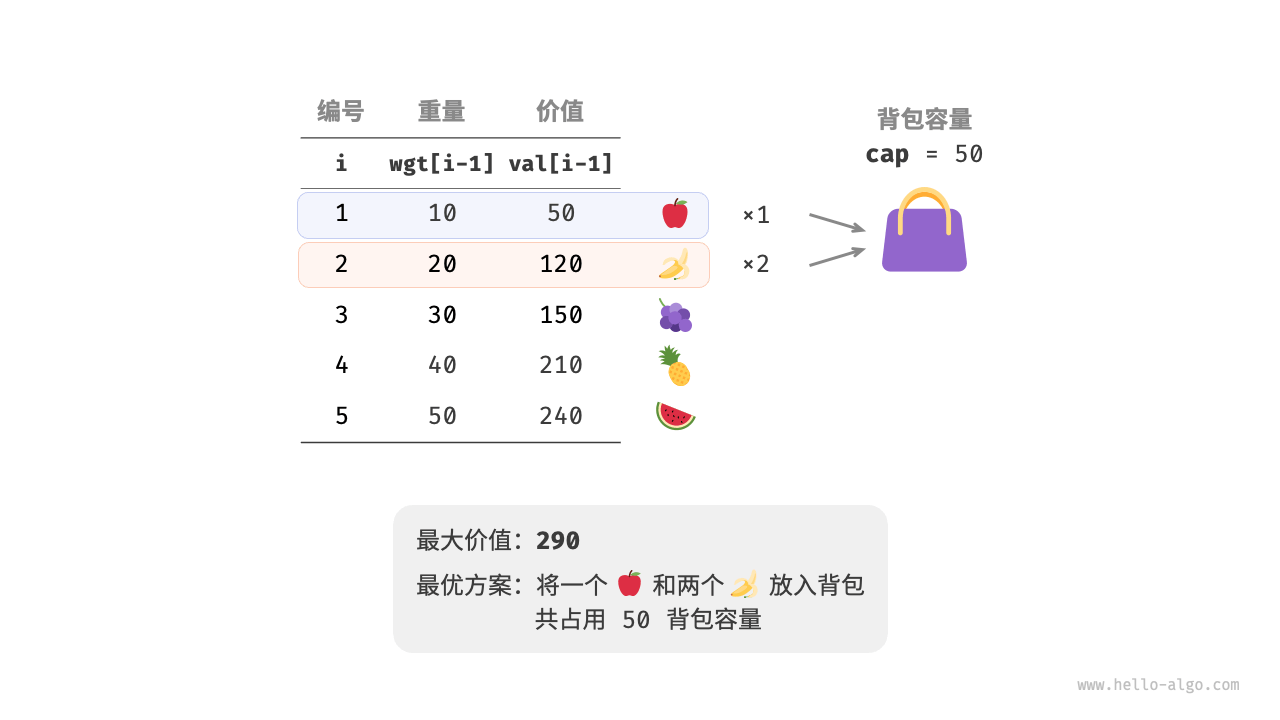
动态规划思路
- 在0-1背包问题中,每种物品只有一个,因此将物品
i放入背包后,只能从前i-1个物品中选择。 - 在完全背包问题中,每种物品的数量是无限的,因此将物品
i放入背包后,任然可以从前i个物品中选择。
在完全背包问题的规定下,状态[i, c]的变化分两种情况。
- 不放入物品
i,与0-1背包问题相同,转移至[i-1, c]。 - 放入物品
i,与0-1背包问题不同,转移至[i, c-wgt[i-1]]。
因此,状态转移方程为:dp[i, c] = max(dp[i-1, c] + dp[i, c-wgt[i-1]] + val[i-1])
代码实现
export const unboundedKnapsackDP = (wgt, val, cap) => {
const n = wgt.length;
// 初始dp表
const dp = Array.from({ length: n + 1 }, () => new Array(cap + 1).fill(0));
// 状态转移
for (let i = 1; i <= n; i++) {
for (let c = 1; c <= cap; c++) {
// 物品重量超过背包剩余容量,不放入
if(wgt[i - 1] > c) {
dp[i][c] = dp[i - 1][c];
} else {
//
dp[i][c] = Math.max(
dp[i - 1][c],
dp[i][c - wgt[i - 1]] + val[i - 1]
);
}
}
}
return dp[n][cap];
};
空间优化
由于当前状态是由左边和上边的状态转移而来,因此空间优化后应该对dp表中的每一行进行正序遍历,这个0-1背包问题正好相反。
export const unboundedKnapsackComp = (wgt, val, cap) => {
const n = wgt.length;
// 初始dp表
const dp = new Array(cap + 1).fill(0);
// 状态转移
for (let i = 1; i <= n; i++) {
for(let c = 1; c <= cap; c++) {
if(wgt[i - 1] <= c) {
dp[c] = Math.max(
dp[c],
dp[c - wgt[i - 1]] + val[i - 1]
);
}
}
}
return dp[cap];
};
零钱兑换问题Ⅰ
给定n种硬币,第i种硬币的面值为coins[i - 1],目标金额为amt,每种硬币可以重复选取,问能够凑出目标金额的最少硬币数量。如果无法凑出,则返回-1。 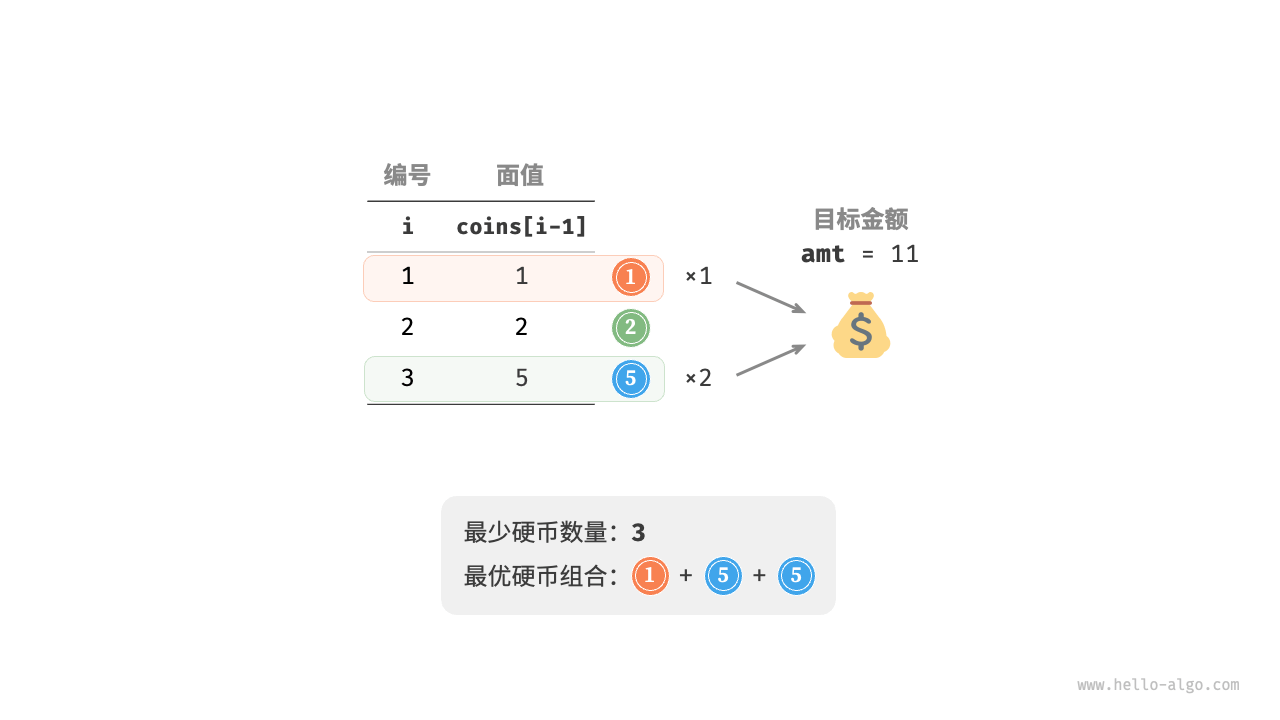
动态规划思路
零钱兑换可以看做是完全背包问题的一种特殊情况,两者具有以下联系和不同点。
- 两道题可以相互转换:物品对应硬币,物品重量对应硬币面值,背包容量对应目标金额。
- 优化目标相反:完全背包问题是最大化物品价值,零钱兑换问题是最小化硬币数量。
- 求解目的不同:完全背包问题是求不超过背包最大容量下的解,零钱兑换问题求恰好凑到目标金额的解。
第一步:思考每轮决策,定义状态,进而得出dp表。 状态[i, a]对应的子问题为:前i种硬币能够凑出金额a的最小硬币数量,记为dp[i, a]。二维dp表为(n + 1) * (amt + 1)。
第二步:找出最优子结构,进而推导出状态转移方程。 本问题和完全背包问题的状态转移方程存在以下差异:
- 本题求解最小值,所有需要使用
min代替完全背包问题中的max。 - 优化主体是硬币数量而非商品价值,因此在选中硬币时执行
+1即可。 根据以上分析,状态转移方程定义为:dp[i, a] = min(dp[i - 1, a], dp[i, a - coins[i - 1]] + 1)
第三步:确定边界条件和状态转移顺序。 当目标金额为0时,凑出它的最少硬币数量为0,即首列dp[i, 0]都为0。当无硬币时,无法凑出任意 > 0的目标金额,即无效解。
代码实现
使用amt + 1代表无效解,其代码实现如下:
export const coinChangeDP = (coins, amt) => {
const n = coins.length;
const max = amt + 1;
// 初始化dp表
const dp = Array.from({ length: n + 1 }, () => Array.from({ length: max }, () => 0));
// 首行、首列
for (let a = 1; a <= amt; a++) {
dp[0][a] = max;
}
// 状态转移:其余行和列
for (let i = 1; i <= n; i++) {
for (let a = 1; a <= amt; a++) {
if(coins[i - 1] > a) {
// 目标金额超出,不选择
dp[i][a] = dp[i - 1][a];
} else {
// 不选择和选硬币i这两种方案的较小值
dp[i][a] = Math.min(
dp[i - 1][a],
dp[i][a - coins[i - 1]] + 1
);
}
}
}
return dp[n][amt] !== max ? dp[n][amt] : -1;
};
空间优化
零钱兑换问题的空间优化和完全背包问题一致:
export const coinChangeDPComp = (coins, amt) => {
const n = coins.length;
const max = amt + 1;
// 初始化dp表
const dp = Array.from({ length: max }, () => max);
dp[0] = 0;
// 状态转移
for (let i = 1; i <= n; i++) {
for (let a = 1; a <= amt; a++) {
if(coins[i - 1] <= a) {
dp[a] = Math.min(
dp[a],
dp[a - coins[i - 1]] + 1
);
}
}
}
return dp[amt] !== max ? dp[amt] : -1;
};
零钱兑换问题Ⅱ
给定n种硬币,第i中硬币的面值为coins[i - 1],目标金额为amt,每种硬币可以重复选取,问能够凑出目标金额的硬币组合数量。 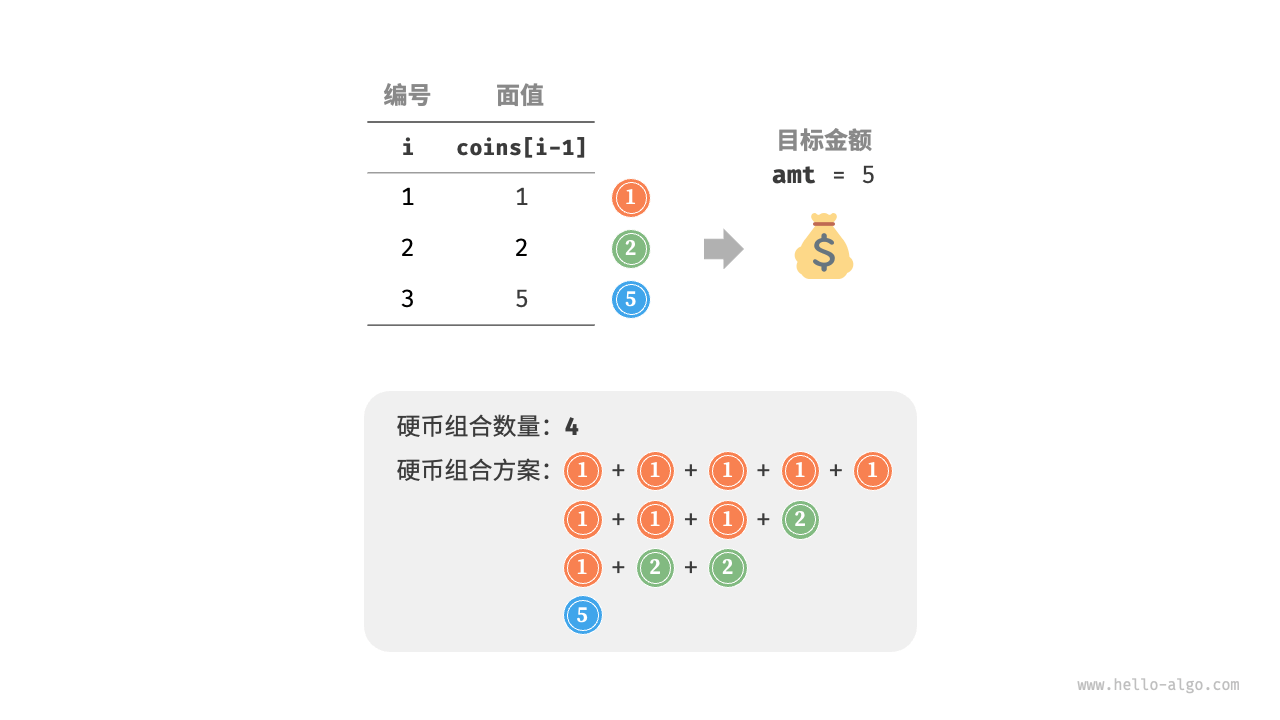
动态规划思路
相较于上一题,本题的目标是求组合数量,因此子问题变为:前i中硬币能够凑出金额为a的组合数量,而dp二维表的尺寸依旧。
状态转移方程为:dp[i, a] = dp[i - 1, a] + dp[i - 1, a - coins[i - 1]]。
当目标金额为0时,无须选择任何硬币即可凑出目标金额,因此应将首列dp[i, 0]赋值为1;当无隐蔽时,无法凑出符合条件的金额,即dp[0, a]赋值为0。
代码实现
export const coinChangeIIDP = (coins, amt) => {
const n = coins.length;
// 初始dp表
const dp = Array.from({ length: n + 1 }, () => Array.from({ length: amt + 1 }, () => 0));
// 首列
for (let i = 0; i <= n; i++) {
dp[i][0] = 1;
}
// 状态转移
for (let i = 1; i <= n; i++) {
for (let a = 1; a <= amt; a++) {
if(coins[i - 1] > a) {
// 超出目标金额,不选
dp[i][a] = dp[i - 1][a];
} else {
// 不选和选择i,这两种方案之和
dp[i][a] = dp[i - 1][a] + dp[i][a - coins[i - 1]];
}
}
}
return dp[n][amt];
};
空间优化
export const coinChangeIIDPComp = (coins, amt) => {
const n = coins.length;
// 初始dp表
const dp = Array.from({ length: amt + 1 }, () => 0);
dp[0] = 1;
// 状态转移
for (let i = 1; i <= n; i++) {
for (let a = 1; a <= amt; a++) {
if(coins[i - 1] <= a) {
// 不选和选择i,这两种方案之和
dp[a] = dp[a] + dp[a - coins[i - 1]];
}
}
}
return dp[amt];
};
编辑距离问题
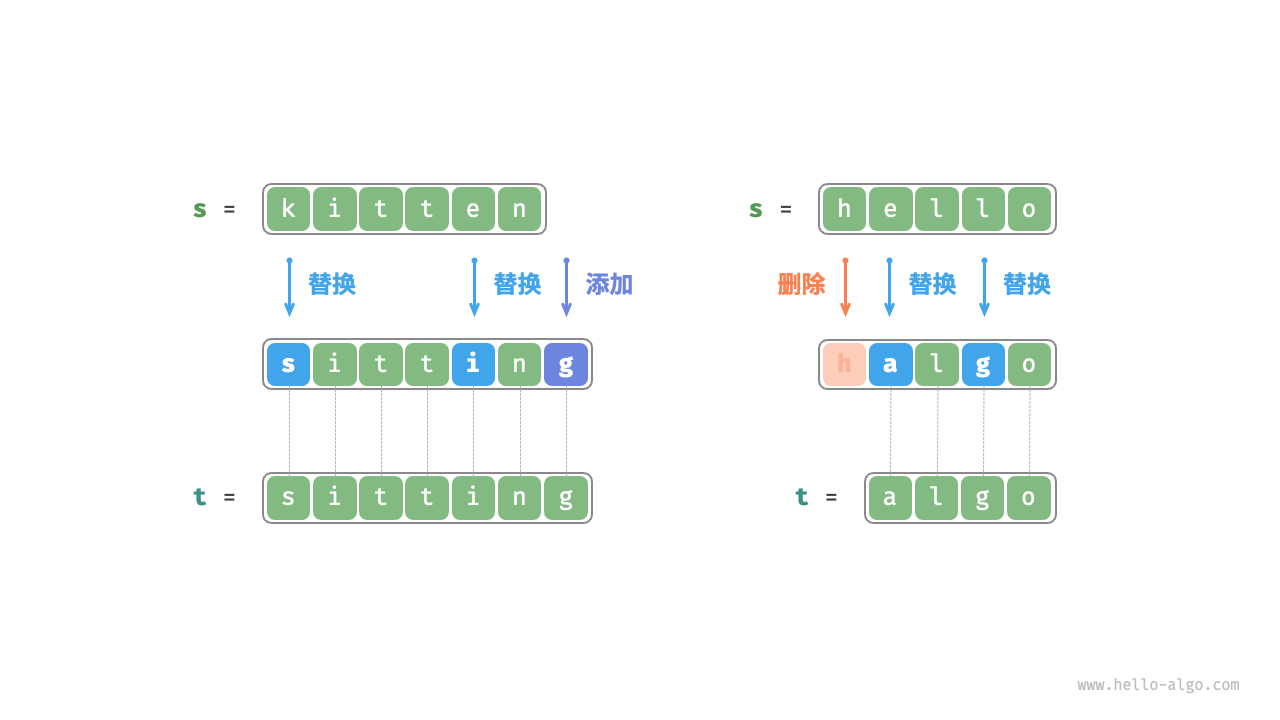
编辑距离问题:是指狂歌字符串之间互相转换的最小次数,通常用于在信息检索和自然语言处理中度量两个序列的相似度。
假设输入两个字符串s和t,返回将s转换为t的最小编辑步数。你可以在字符串中进行三种编辑操作:插入一个字符,删除一个字符和替换一个字符。编辑距离问题可以很自然的用决策树模型来解释,字符串对应树节点,一轮决策对应树的一条边。
动态规划思路
第一步:思考每轮的决策,定义状态,进而得到dp表:
每一轮的决策是对字符串s进行一次编辑操作,我们希望在编辑操作的过程中,问题的规模逐渐缩小,这样才能构建子问题。
设字符串s和t的长度分别为n和m,我们先考虑两字符串尾部的字符s[n - 1]和t[m - 1]。
- 若
s[n - 1]和t[m - 1]相同,则可以跳过它们,直接考虑s[n - 2]和t[m - 2]。 - 若
s[n - 1]和t[m - 1]不相同,我们需要对s进行一次编辑操作(插入,删除或者替换),使得两字符的尾部字符相同。
因此,将状态定义为字符串s和t中,分别对应的第i和第j个字符,记为[i, j]。状态[i, j]对应的子问题即为:将字符串s的前i个字符更改为t的前j个字符所需的最小编辑步数。
至此,得到一个尺寸为(i + 1) * (j + 1)的二维dp表。
第二步:找出最优子结构,进而推导出状态转移方程:
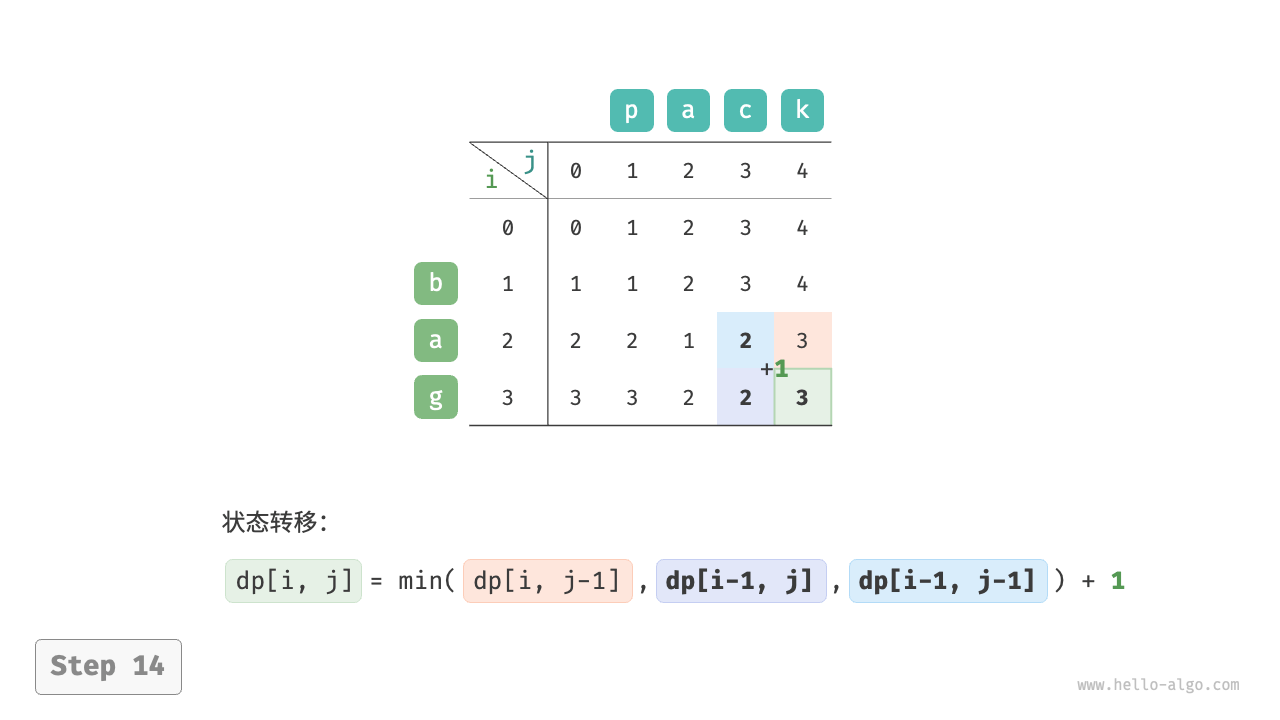
考虑子问题dp[i, j],其对应的两个字符串的尾部字符为s[i - 1]和t[j - 1],可根据不同的编辑分三种情况:
- 在
s[i - 1]之后添加t[j - 1],则剩余子问题为dp[i, j - 1]。 - 删除
s[i - 1],则剩余子问题为dp[i - 1, j]。 - 将
s[i - 1]替换为t[j - 1],则剩余子问题dp[i - 1, j - 1]。
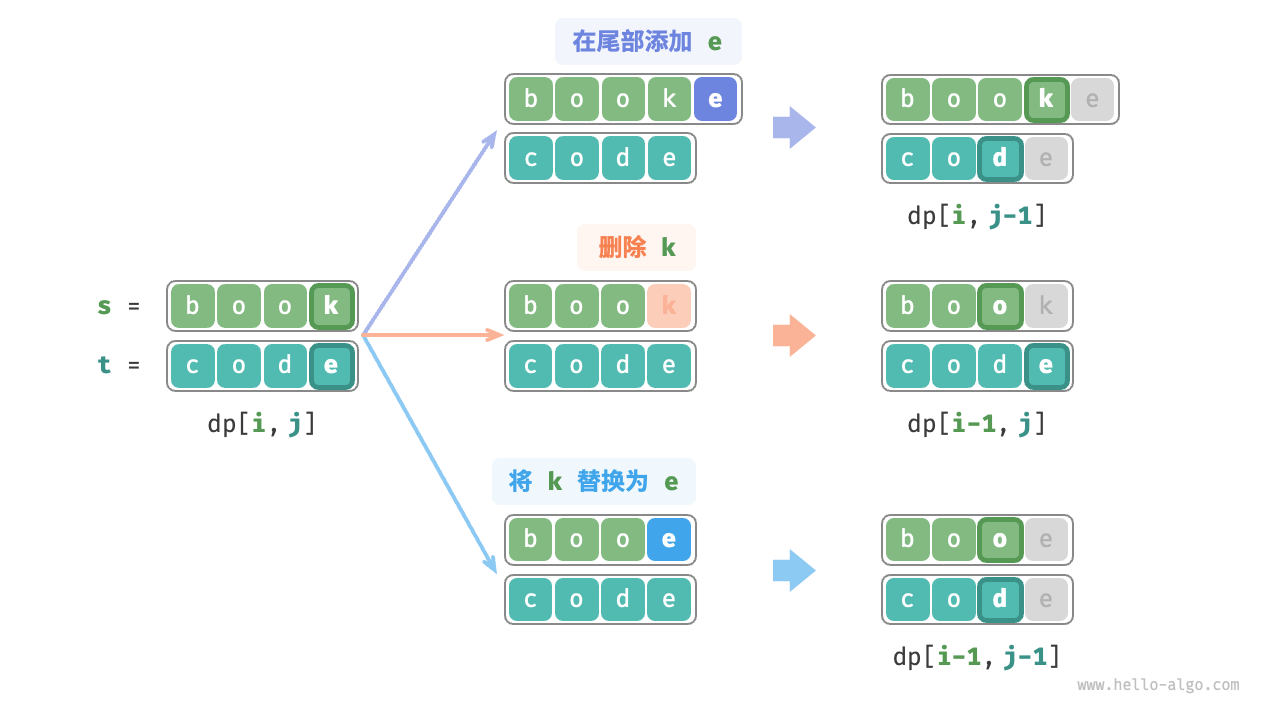
根据以上分析,其状态转移方程为:dp[i, 1] = min(dp[i, j - 1], dp[i - 1, j], dp[i - 1, j - 1]) + 1
第三步:确定边界条件和状态转移顺序:
- 当两个字符串为空时,编辑步数为0,即
dp[0, 0] = 0。 - 当
s为空但t不为空时,最小编辑距离等于t的长度,即首行dp[0, j] = j。 - 当
s不为空但t为空时,最小编辑距离等于s的长度,即首列dp[i, 0] = i。
代码实现
// 最少编辑距离问题:DP
export const editDistanceDP = (s, t) => {
const n = s.length;
const m = t.length;
const dp = Array.from({ length: n + 1 }, () => new Array(m + 1).fill(0));
// 状态转移:首行,首列
for (let i = 1; i <= n; i++) {
dp[i][0] = i;
}
for (let j = 1; j <= m; j++) {
dp[0][j] = j;
}
// 状态转移:其余行和列
for (let i = 1; i <= n; i++) {
for (let j = 1; j <= m; j++) {
if (s.charAt(i - 1) === t.charAt(j - 1)) {
// 字符相等,直接跳过
dp[i][j] = dp[i - 1][j - 1];
} else {
// 最小编辑步数:插入、删除、替换这三种操作的最小编辑步数 + 1
dp[i][j] = Math.min(
dp[i][j - 1],
dp[i - 1][j],
dp[i - 1][j - 1]
) + 1;
}
}
}
return dp[n][m];
};
空间优化
由于dp[i, j]是由上方dp[i - 1, j],左方dp[i, j - 1]和左上方dp[i - 1, j - 1]转移而来,而正序遍历会丢失左上方dp[i - 1, j - 1],倒序遍历无法提前构建dp[i, j - 1],因此两种遍历顺序都不可取。
为此,我们使用一个变量leftUp来暂时存放左上方的解,从而只考虑左方和上方的解。
// 最小编辑距离问题:空间优化
export const editDistanceDPComp = (s, t) => {
const n = s.length;
const m = t.length;
const dp = new Array(m + 1).fill(0);
// 状态转移:首行
for (let j = 1; j <= m; j++) {
dp[j] = j;
}
// 状态转移:其余行
for (let i = 1; i <= n; i++) {
let leftUp = dp[0];
dp[0] = i;
for (let j = 1; j <= m; j++) {
const temp = dp[j];
if (s.charAt(i - 1) === t.charAt(j - 1)) {
dp[j] = leftUp;
} else {
dp[j] = Math.min(dp[j - 1], dp[j], leftUp) + 1;
}
leftUp = temp;
}
}
return dp[m];
};