搜索
二分查找
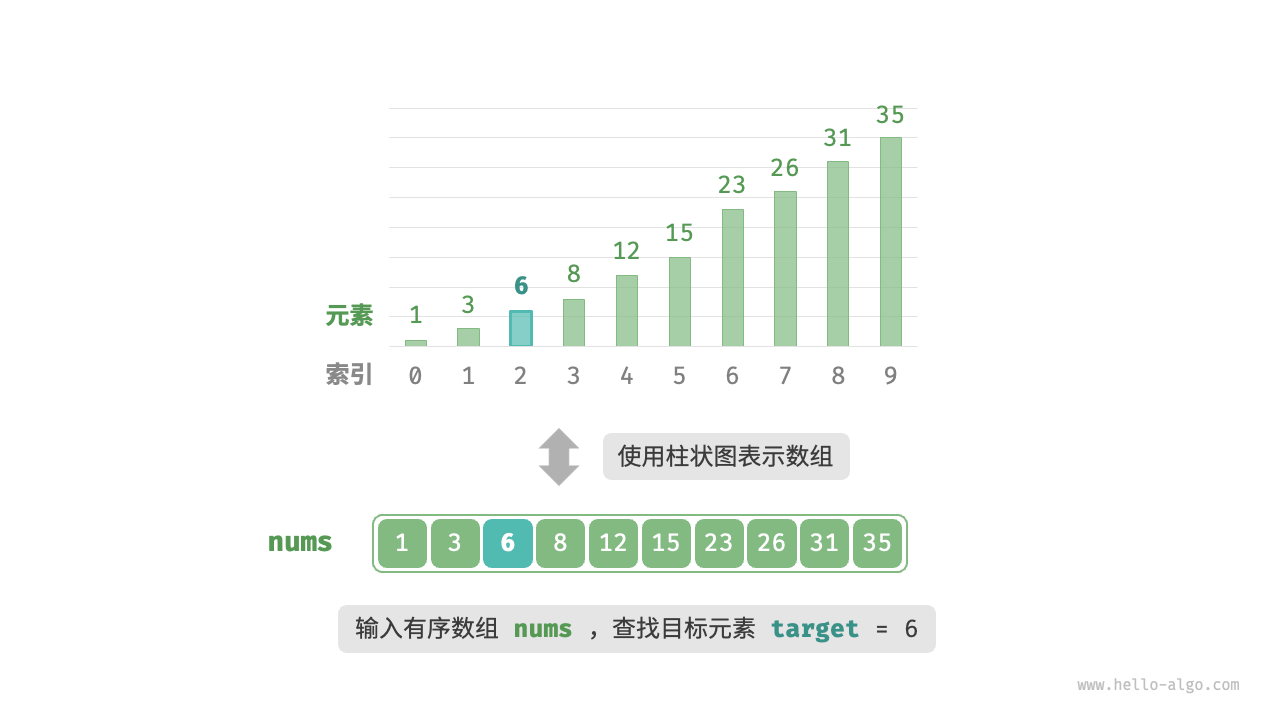
二分查找Binary Search,是一种基于分治策略的高效搜索算法。它利用数据的有序性,每轮缩小一半的搜索范围,直至找到目标元素或者搜索区间为空为止。
二分查找
例如,有如下问题:给定一个长度为N的数组nums,元素按从小到大的排列顺序且不重复。请查找并返回元素target在该数组中的索引位置。如数组不包含该元素,则返回-1。
按照二分查找思想,其步骤如下:
- 初始化指针
i和j = n - 1,分别指向数组首元素和尾元素,其初始搜索区间表示为[0, n - 1]。 - 计算区间的中点索引,
m = (i + j) / 2,其中m的值向下取整。考虑到存在大数相加超出取值范围的风险,中点索引计算逻辑调整为:m = i + (j - i) / 2。 - 判断
nums[m]和target的关系,分为三种情况。
nums[m] < target:说明目标元素在[m + 1, j]的索引区间内,执行i = m + 1。nums[m] > target:说明目标元素在[i, m - 1]的索引区间内,执行j = m - 1。nums[m] = target:说明找到了目标元素,返回m即可。
- 若数组不包含目标元素,则最终搜索区间会缩小为空,返回
-1。
// 时间复杂度:O(logn),每轮缩小一半的搜索范围
// 空间复杂度:O(1),仅定义常量指针
export default function binarySearch(nums, target) {
let i = 0;
let j = nums.length - 1;
while(i <= j) {
const m = Math.floor(i + (j - i) / 2);
const val = nums[m];
if (val < target) {
i = m + 1;
} else if (val > target) {
j = m - 1;
} else {
return m;
}
}
return -1;
}
二分查找的局限性
优势:
- 二分查找在数据量大的情况下,查找效率十分的高,因为其时间复杂度为
O(logn)。 - 二分查找无须额外空间,相较于需要借助额外空间的搜索算法(例如,哈希表查找),二分查找更加节省空间。
不足:
- 二分查找仅适用于有序数据,若输入数据无序,为了使用二分查找而专门进行排序,而排序算法通常时间复杂度为
O(nlogn),得不偿失。 - 二分查找仅适用于数组,不适用应用与链表或者基于链表的数据结构。
- 小数据量下,线性查找的性能反而更佳,因为二分查找中有加法、除法、判断等操作。
二分查找的插入点
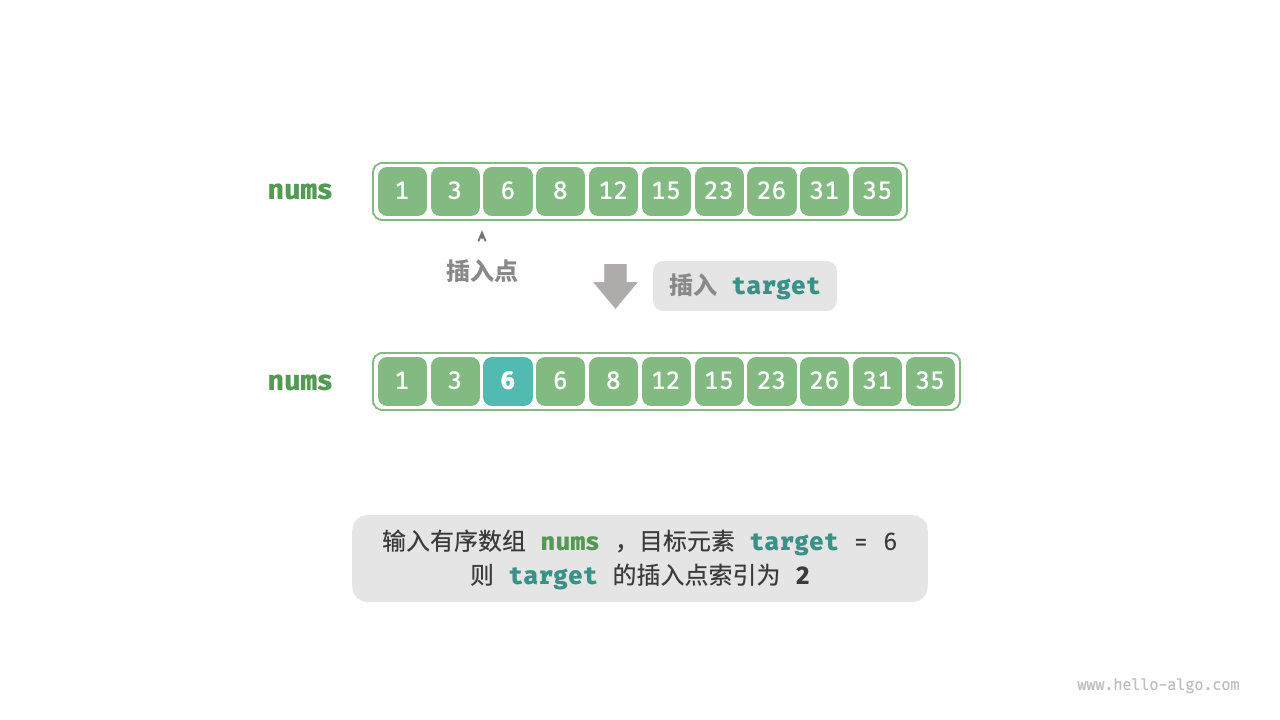
二分查找不仅适用于查找目标元素,还可用于解决许多变种问题,例如搜索目标元素的插入位置。
示例:给点一个长度为N的有序数组nums和一个元素target,数组不存在重复元素。现需要将target插入数组nums中,并保持其有序性。若数组中已存在元素target,则插入到其左侧。请返回插入后target在新数组中的索引位置。
// 不存在target时,i的位置即最终插入位置
// 已存在target时,当循环完毕后,i指向第一个大于target的值,即i也为最终插入位置。
export default function binarySearchIntersectionSimple(nums, target) {
let i = 0;
let j = nums.length - 1;
while(i <= j) {
const m = Math.floor(i + (j - i) / 2);
const val = nums[m];
if (val < target) {
i = m + 1;
} else if (val > target) {
j = m - 1;
} else {
return m;
}
}
return i;
}
新要求:在以上题不变的情况下,规定数组包含重复元素。
思路:
- 当
nums[m] < target或nums[m] > target时,此时还没有找到target,则继续使用二分法查找。 - 当
nums[m] === target时,证明已经找到了target其中一个目标位置,即在[i, m - 1]的区间内,沿用二分查找的思路继续,直至搜索区间为空,此时i即为最终插入位置。
export default function binarySearchIntersection(nums, target) {
let i = 0;
let j = nums.length - 1;
while(i <= j) {
const m = Math.floor(i + (j - i) / 2);
const val = nums[m];
if (val < target) {
i = m + 1;
} else if (val > target) {
j = m - 1;
} else {
j = m - 1;
}
}
return i;
}
二分查找边界
与二分查找的插入点类似,在nums元素存在重复的情况下,可以找到target目标元素的左边界和右边界。
查找左边界
示例:给点一个长度为N的有序数组nums,其中可能包含重复元素。请返回数组中最左一个元素target的索引,若数组不包含target目标元素,则返回-1。
查找target的左边界,其本质就是找其插入点。
import binarySearchIntersection from './binarySearchIntersection.js';
export default function binarySearchLeftEdge(nums, target) {
const i = binarySearchIntersection(nums, target);
if (i === nums.length || nums[i] !== target) {
return -1;
}
return i;
}
查找右边界
示例:给点一个长度为N的有序数组nums,其中可能包含重复元素。请返回数组中最右一个元素target的索引,若数组不包含target目标元素,则返回-1。
查找target的右边界,本质就是找其target + 1的插入点,因此可以服用查找左边界的代码。
import binarySearchIntersection from './binarySearchIntersection.js';
export default function binarySearchRightEdge(nums, target) {
const i = binarySearchIntersection(nums, target + 1);
const j = i - 1;
if (j === -1 || nums[i] !== target) {
return -1;
}
return j;
}
重识搜索算法
搜索算法:用于在数据结构(例如数组、链表、树和图)中搜索一个或者一组满足特定条件的元素。
搜索算法可根据实现思路分为以下两类:
- 通过遍历数据结构来定位目标元素,例如:数组、链表、树和图的遍历。
- 利用数组组织结构或数据包含的先验信息,实现高效元素查找,例如二分查找,哈希查找和二叉搜索树查找等。
暴力搜索
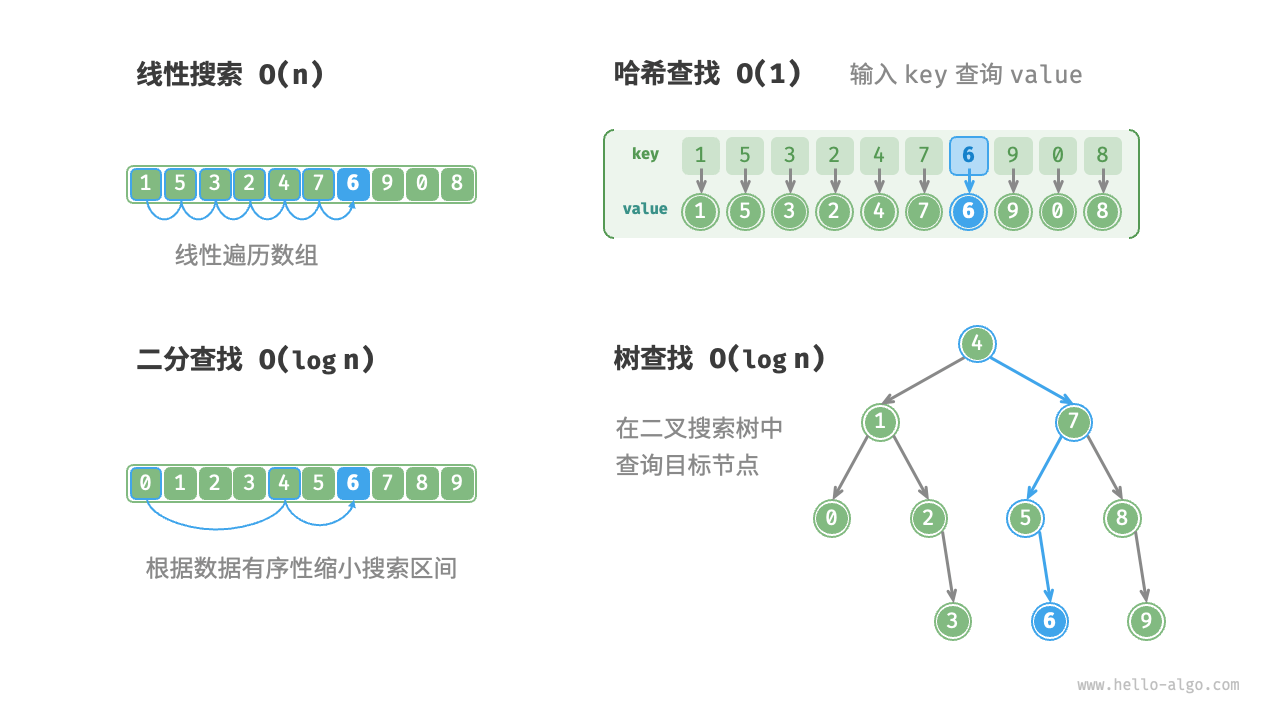
暴力搜索:通过遍历数据结构中的每一个元素来定位目标元素,此类算法的时间复杂度通常为O(n)。
- 线性搜索适用于数组和链表等线性数据结构,它从数据结构的一端开始,逐个访问元素,直到找到目标元素或者到达另外一端仍然没有找到目标元素为止。
- 广度优先搜索和深度优先搜索是图和树的两种遍历策略。广度优先搜索从初始节点开始逐层搜索,由近及远的访问各个节点。深度优先搜索从初始节点开始,沿着一条路径走到头,再回溯并尝试其它路径,直到遍历完整个数据结构。
自适应搜索
自适应搜素:利用数据的特有属性来优化搜索过程,从而高效的定位目标元素,此类算法的优点是效率高,时间复杂度通常可达O(logn)或者O(1)。
- 二分查找:利用数据的有序性实现高效查找,仅适用于数据。
- 哈希查找:利用哈希表将搜索数据和目标数据建立为键值对映射,从而实现查询操作(空间换时间)。
- 树查找:在特定的树结构(例如,二叉搜索树)中,基于比较节点的值来快速排除节点,从而定位目标元素。
搜索算法选取
以上各个搜索算法的原理如下:
| 操作 | 线性搜索 | 二分查找 | 树查找 | 哈希查找 |
|---|---|---|---|---|
| 查找元素 | O(n) | O(logn) | O(logn) | O(1) |
| 插入元素 | O(1) | O(n) | O(logn) | O(1) |
| 删除元素 | O(n) | O(n) | O(logn) | O(1) |
| 额外空间 | O(1) | O(1) | O(n) | O(n) |
| 数据预处理 | / | 排序O(nlogn) | 建树O(nlogn) | 建哈希表O(n) |
| 数据是否有序 | 否 | 是 | 是 | 否 |
搜索算法的选择还取决于数据体量、搜索性能要求、数据查询与更新频率等。
线性搜索
- 通用性较好,无须任何数据预处理操作。假如我们仅需查询一次数据,那么其他三种方法的数据预处理的时间比线性搜索的时间还要更长。
- 适用于体量较小的数据,此情况下时间复杂度对效率影响较小。
- 适用于数据更新频率较高的场景,因为该方法不需要对数据进行任何额外维护。
二分查找
- 适用于大数据量的情况,效率表现稳定,最差时间复杂度为
O(logn)。 - 数据量不能过大,因为存储数组需要连续的内存空间。
- 适用于高频增删数据的场景,因为维护有序数组的开销较大。
哈希查找
- 适合对查询性能要求很高的场景,平均时间复杂度为
O(1)。 - 不适合需要有序数据或范围查找的场景,因为哈希表无法维护数据的有序性。
- 对哈希函数和哈希冲突处理策略的依赖性较高,具有较大的性能劣化风险。
- 不适合数据量过大的情况,因为哈希表需要额外空间来最大程度地减少冲突,从而提供良好的查询性能。
树查找
- 适用于海量数据,因为树节点在内存中是分散存储的。
- 适合需要维护有序数据或范围查找的场景。
- 在持续增删节点的过程中,二叉搜索树可能产生倾斜,时间复杂度劣化至
O(n)。 - 若使用 AVL 树或红黑树,则各项操作可在
O(logn)效率下稳定运行,但维护树平衡的操作会增加额外的开销